





























F4000N Series Operating Manual
Section 6: Sample Programs
Part # 562187N-1
Rev. D Sep 2012
91
© 2012 Fisnar Inc.
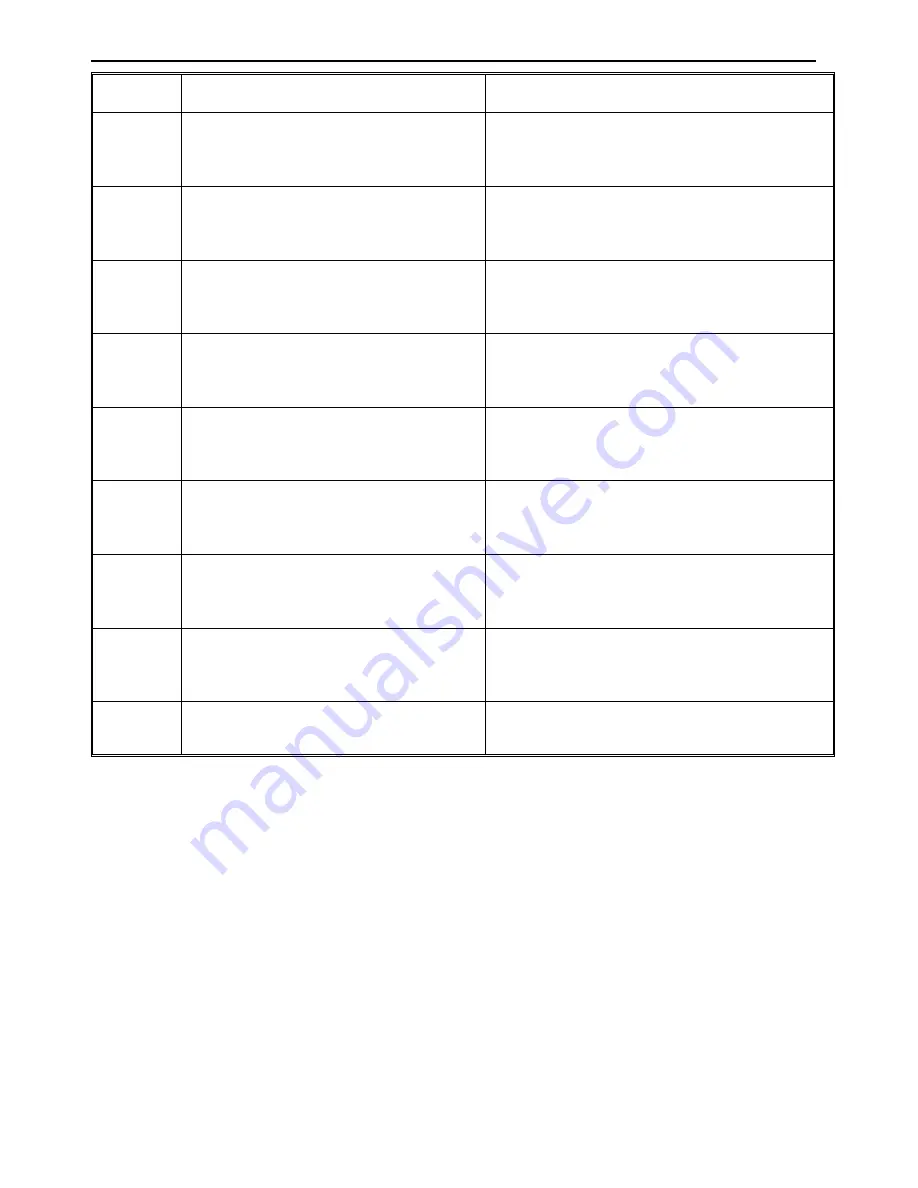
Addr.
Command
Notes
0006
Line Start (10, 10, 35)
Registers a Line Start point at
X: 10 mm, Y: 10 mm, Z: 35 mm
0007
Line Passing (10, 20, 35)
Registers a Line Passing point at
X: 10 mm, Y: 20 mm, Z: 35 mm
0008
Arc (5, 25, 35)
Registers an Arc point at
X: 5 mm, Y: 25 mm, Z: 35 mm
0009
Line Passing (10, 30, 35)
Registers a Line Passing point at
X: 10 mm, Y: 30 mm, Z: 35 mm
0010
Line End (10, 40, 35)
Registers a Line End point at
X: 10 mm, Y: 40 mm, Z: 35 mm
0011
Dispense Dot (20, 20, 35)
Dispenses a dot at
X: 20 mm, Y: 20 mm, Z: 35 mm
0012
Dispense Dot (20, 25, 35)
Dispenses a dot at
X: 20 mm, Y: 25 mm, Z: 35 mm
0013
Dispense Dot (20, 30, 35)
Dispenses a dot at
X: 20 mm, Y: 30 mm, Z: 35 mm
0014
End Program
Ends the program. Returns the tip to the
home position.
Summary of Contents for F400N Series
Page 118: ......







































































