





























–
The safety relay unit and its inputs and outputs must meet the necessary safety classification of
the safety function that is required in each case.
–
Connect each of the control inputs to the safety relay unit on 2 channels using parallel wiring.
–
Only use permitted motor cables for the connection BR+/BR– .
–
If the diagnostic output of the safety sub-function concerned has to be evaluated: Connect dia-
gnostic output directly to the safety relay unit. Evaluation of the diagnostic output is either man-
datory or optional depending on which safety classification is desired.
–
If diagnostic outputs are cross-wired for a device compound: Wire diagnostic outputs as a ring.
Guide the two ends of the ring to the safety relay unit and monitor for discrepancies.
Basic concept of the wiring
–
Safe sensors – e.g. emergency stop switches, light curtains – are routed to the safety relay unit (or
the safety PLC).
–
The safety relay unit requests the safety sub-functions on the servo drive via 2 channels and eval-
uates the related feedback signals.
–
It is not permitted to connect sensors, e.g. emergency stop devices, directly to the servo drive
because no sensor monitoring takes place.
5.2
STO installation
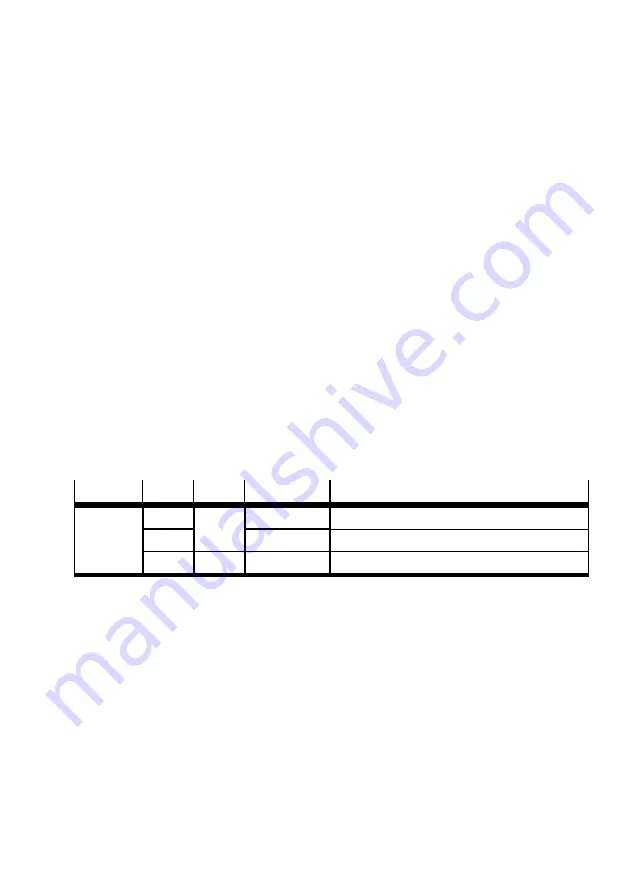
Inputs and outputs for the safety sub-function STO
The 2-channel request for the safety sub-function is made via the digital inputs #STO-A and #STO-B.
The STA diagnostic output indicates whether the safe status has been reached for the safety sub-func-
tion STO.
Connection Pin
Type
Identifier
Function
X1A.11
#STO-B
Safe torque off, channel B
X1A.12
DIN
#STO-A
Safe torque off, channel A
[X1A]
X1A.22
DOUT
STA
Safe torque off acknowledge
Tab. 8 Inputs and outputs for the safety sub-function STO
STO connection example
The safety sub-function STO (safe torque off) is triggered by an input device that makes the safety
request (e.g. light curtain).
Installation
23
Festo — CMMT-AS-...-S1 — 2018-10a
Summary of Contents for CMTT-AS S1 Series
Page 45: ......