ETAS
Functional Description
ES921.1
-
User Guide
17
5
Functional Description
This chapter describes the block diagram, the operating modes and the termi
-
nation of the CAN interfaces, the “Wake-Up” and “Sleep” functions as well as the
firmware update.
5.1
Block Diagram
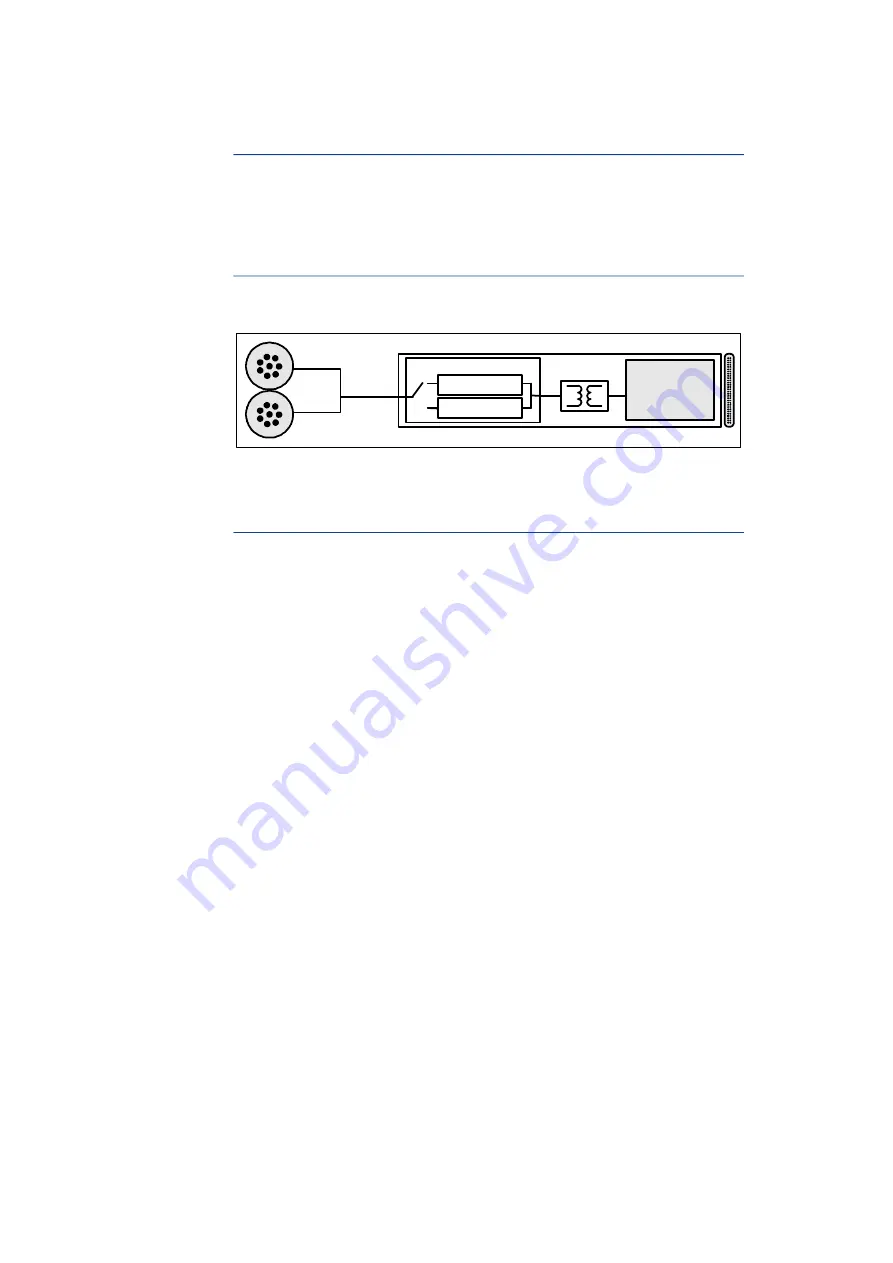
The ES910 has a slot for extension modules (extension slot). This slot can, for
example, accommodate the ES921.1 CAN Module.
Fig.
5
-
1
Block Diagram of the ES921.1
5.2
CAN Interface (CAN1, CAN2)
The ES921.1 has two CAN interfaces. One of the CAN interfaces is routed to the
two 8-pin CAN1 and CAN2 connectors (Lemo sockets) on the front panel.
CAN1 and CAN2 are independent CAN interfaces with independent connec
-
tions and CAN controllers. The CAN interfaces establish a simple and direct
connection between the ES921.1 and the CAN network.
The interfaces are galvanically isolated from each other.
5.2.1
Operating Modes
The CAN interfaces of the ES921.1 can be operated in High-Speed CAN link
(ISO 11898-2) or Low-Speed CAN link (ISO 11898-3). Switching between the
two operating modes is controlled by software. The operating mode can be
selected individually for each interface.
5.2.2
Feature
The connection to the external device takes place with a maximum transfer
rate of 1
MBaud (ISO-Highspeed Norm). The baud rates can be configured in
the calibration software.
The following CAN applications are supported:
• CAN-IO with INTECRIO
• XCP on CAN Bypass with INTECRIO
• “Wake-Up” function (only for High-Speed CAN)
The functions are extended successively both for measuring and calibration
and for rapid prototyping.
CAN
Controller
CAN Transceiver
High Speed
Low Speed
CAN1
/
2
CAN2