





























RS3 RS4 Maintenance 6. Joint #2
50
RS series Maintenance Rev.3
6.1 Replacing Joint #2 Motor
Name
Quantity
Note
Maintenance
Parts
AC Servo Motor
200 W (RS3-351*)
1
1514451
400 W (RS4-551*)
1
1514468
Tools
Hexagonal wrench
width across flats: 2.5 mm
1
For M5 set screw
width across flats: 3 mm
1
For M4 screw
width across flats: 4 mm
1
For M5 screw
Nippers
1
For cutting wire tie
Force gauge
1
Belt tension
100 N (10.2 kgf)
Suitable cord (Length about 800 mm)
1
For belt tension
Wiping cloth
1
For wiping grease
Material
Wire tie
4
Grease
Grease (SK-1A)
6 g
W
hen tightening hexagon socket head cap bolts, refer to the
2.4 Tightening Hexagon Socket
Head Cap Bolts.
Joint #2 motor
Removal
(1) Remove the Arm #1 cover.
For details, refer to
3.1 Arm #1.
(2) Remove the Arm #1 under cover.
For details, refer to
3.1 Arm #1.
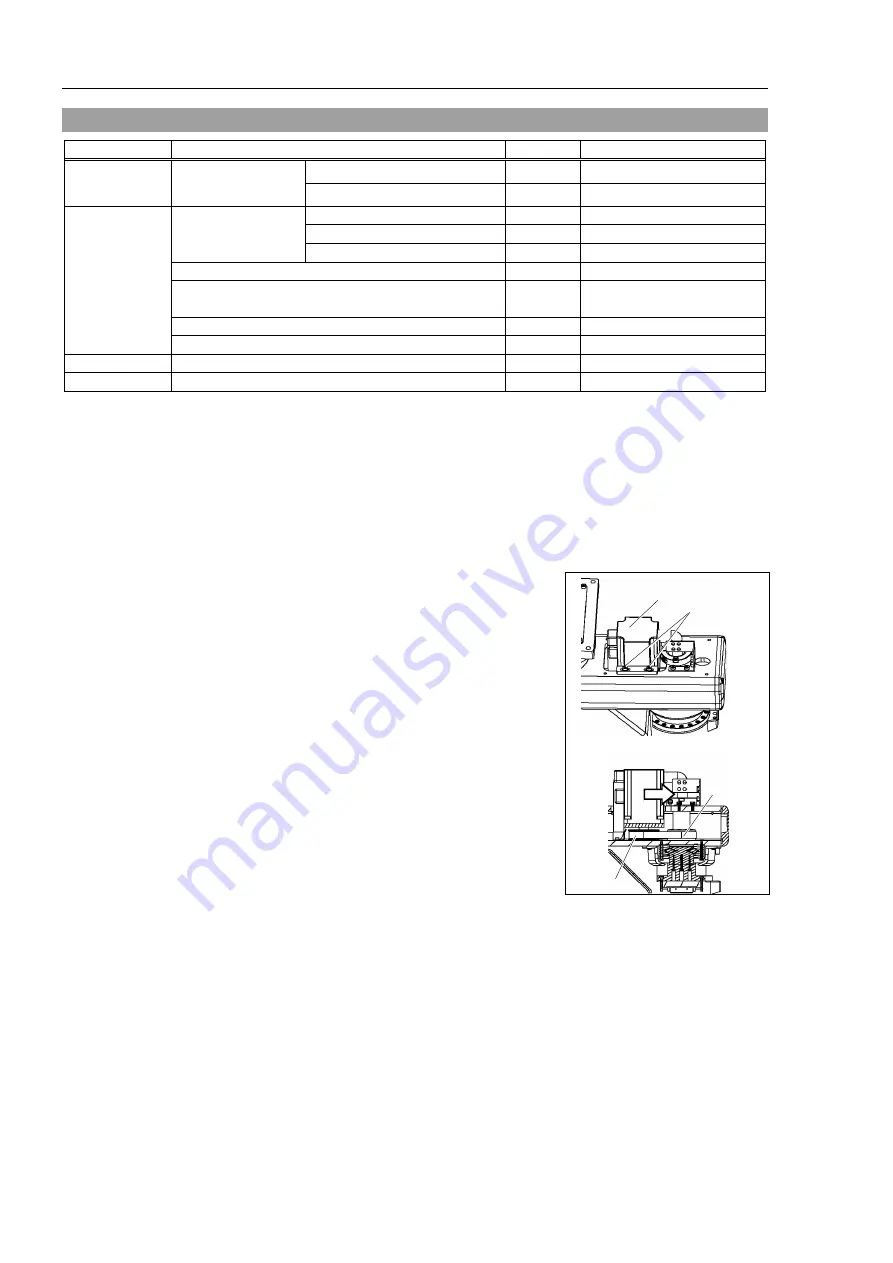
(3) Disconnect the following connectors.
Connectors X21, X221, XB22 (Hold the clip to
remove.)
4-M4
×
5
+ washer
Joint #2 motor unit
J2 belt
Pulley
(4) Loosen the J2 belt.
Loosen four bolts securing the Joint #2 motor unit.
Slide the Joint #2 motor unit toward the Joint #2 side.
NOTE







































































