















maxon motor control
EPOS Positioning Controller
EPOS Application Note: Interpolation Position Mode
20
maxon motor control
Edition December 2008 / Subject to change
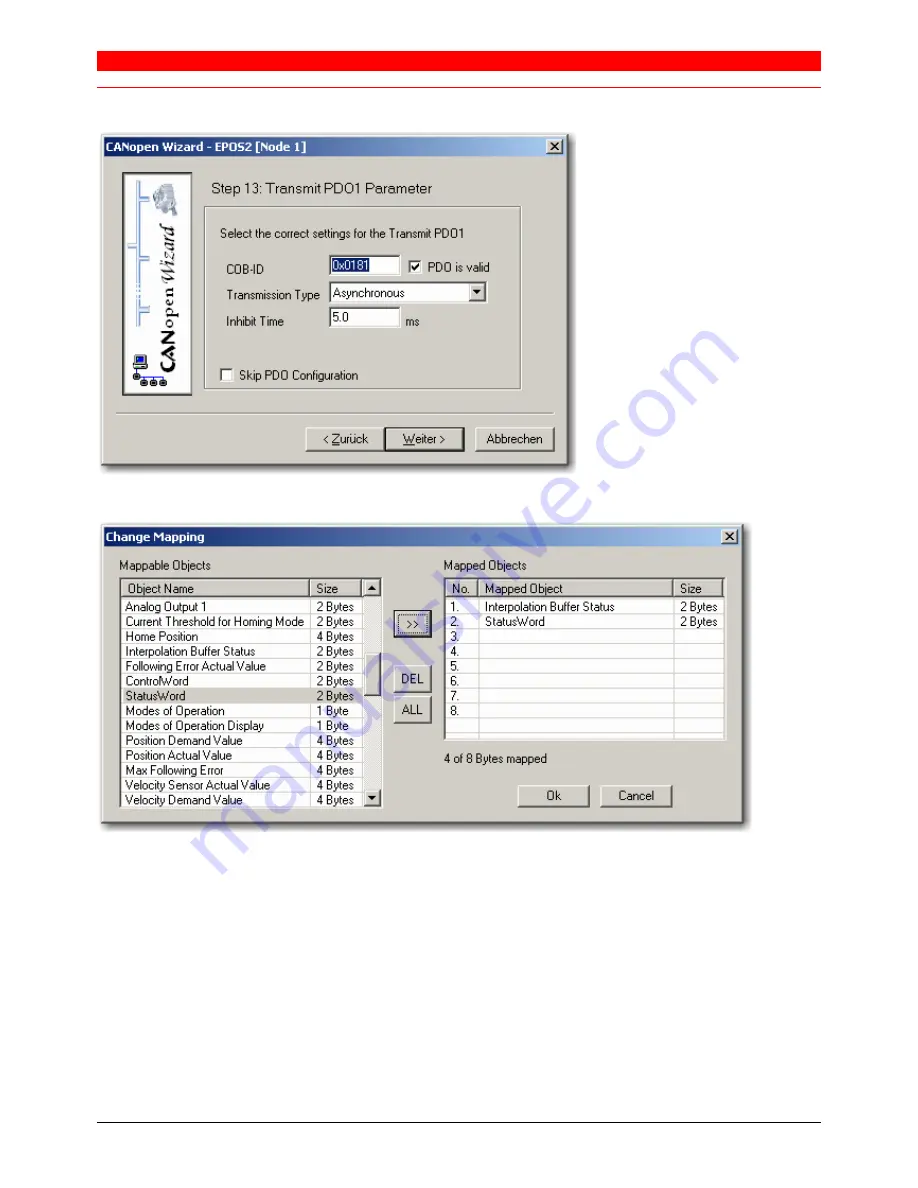
Step 5: Set "PDO is valid", transmission type to "Asynchronous" and "inhibit time" to e.g. 5.0 ms
Step 6: Delete all mapped Object in "Change Mapping" window
Step 7: Add "Interpolation Buffer Status" and "StatusWord" to Transmit PDO1
Step 8: go on to finish to CANopen Wizard
Motion Synchronisation
The interpolated position mode enables the synchronized motion of multiple axes. The motions of several slave
axes can be synchronized if they all run in IPM, and they all have the same time.
In order to start several axes synchronously, map the
controlword to a synchronous RPDO, and then use the
mapped
controlword to enable interpolation for all axes. Nothing will happen until the next SYNC. Then, all drives
will enable interpolated motion at once, setting the SYNC arrival time as the “zero” time of the path specification.
If the axes have been synchronized by the
SYNC-Time stamp mechanism, the moving axes should be relatively
synchronized to the precision of microseconds.
If the CAN (SYNC) master is not able to produce the high resolution time stamp it is also possible to use one
EPOS2 as clock master. For this the “High Resolution Time Stamp” object (0x1013) should be mapped to a
synchronous transmit PDO on the clock master EPOS2. The other EPOS2 in the system has to be configured as