





























CyBio Carry
Installation and commissioning
25
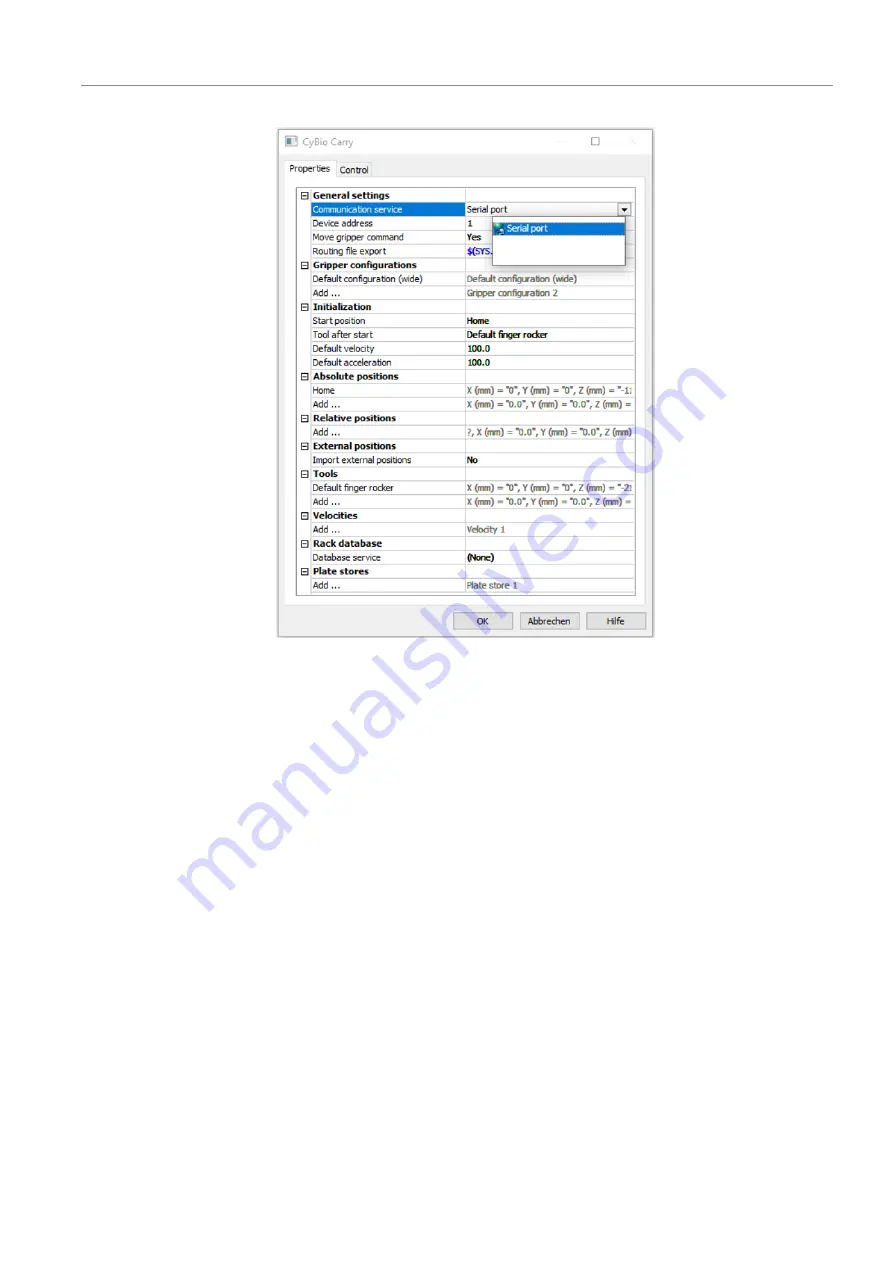
Fig. 19
CyBio Carry window
}
Under
General settings
|
Communication service
, select the serial interface.
The tool and the gripper configuration are preset in the software and do not need to
be changed.
}
Optionally: adjust the default speed and acceleration under
Initialization
.
(A setting of 50 means that the gripper fingers move at 50% of the preset speed.)
}
Confirm your selection with
[OK]
.