










www.emaxmodel.com
SKYLINE32
3
②
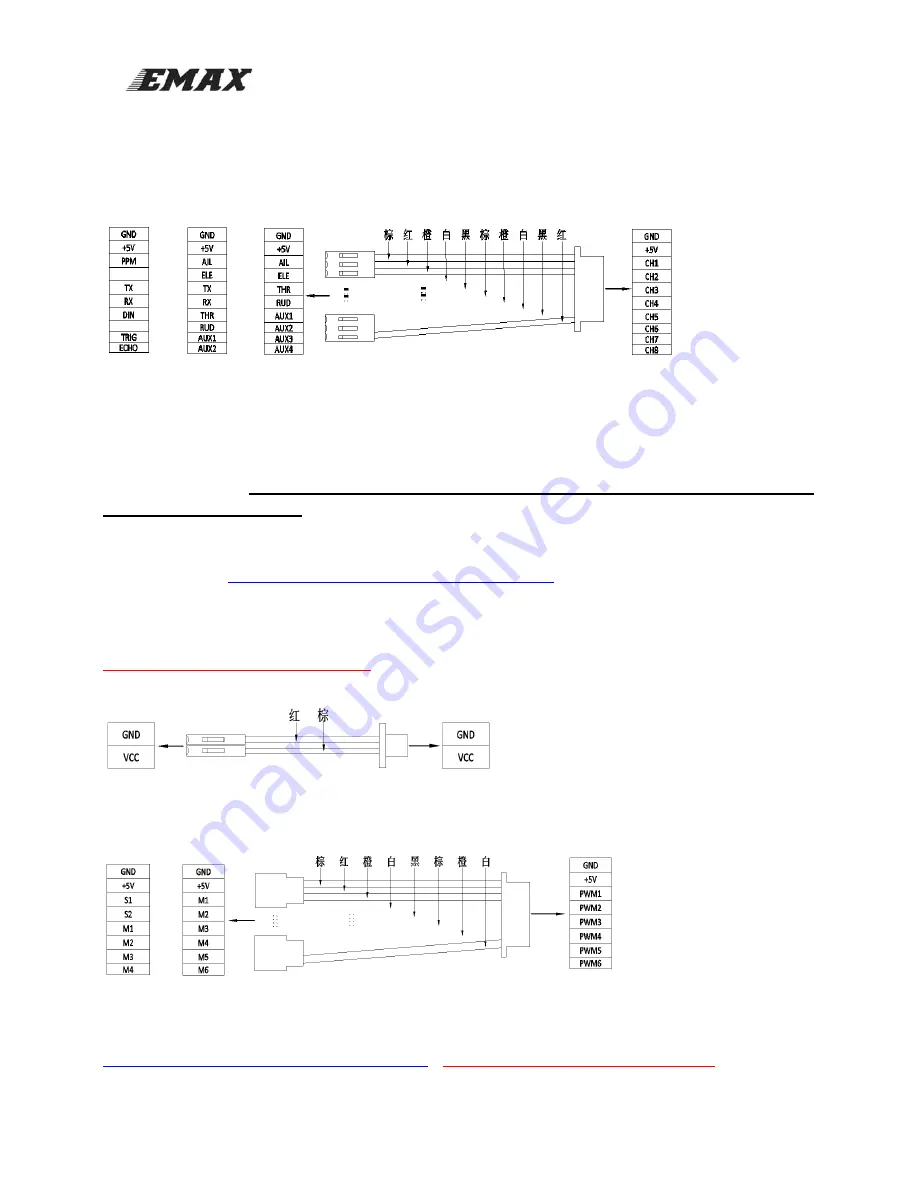
RC Input
(
PWM/CPPM
)
/
Servo Output
/
GPS connector
.
Default pins order is (from top to bottom): GND
,
+5V
,
CH1-CH8. CH1-CH8 for channels: AIL
,
ELE
,
THR
,
RUD
,
AUX1
…
AUX4.
PPM GPS Standard
Connection Connection Connection 10Pin Wire
RC_IN
When GPS feature is enabled, CH3 and CH4 are used for GPS connection.(CH3:TX, CH4:RX). When using
CPPM receiver, these are normally unused, with standard receiver, connect AIL to 1, ELE to CH2, THR to CH5,
RUD to CH6, and AUX1/2 to CH7 and CH8.
When using CPPM receiver, CH5 to CH8 can also be used as motor or servo outputs, depending on
airframe
type
and configuration.
③
Bootloader pads: ***
ONLY USE IF GUI CAN NOT CONNECT TO SKYLINE32. This is not required for
normal firmware updates.
When upgrading firmware, use a forcep to short pads together and power
SKYLINE32 on by USB cable. After power LED indicator turns blue, then remove the short. Firmware updated
tool can then be used to reload firmware.
Download source:
http://yinyanmodel.com/En/DownView.asp?ID=39
④
Battery Voltage Monitor: connect this header to battery or power distribution board to enable battery voltage
monitoring. Supports Up to 6S LiPo battery.
。
Warning:
No reverse polarity protection - connecting battery in reverse will instantly destroy the hardware.
Note: MINI version without this connector
Power 2Pin Wire Vbat
⑤
ESC / Servo Headers: From right to left: GND
,
+5V
,
PWM1- PWM6. Standard mode: PWM1-PWM6 for ESC
input M1-M6; Servo mode: PWM1-PWM6 for servo input S1, S2 and ESC input M1-M4.
Servo Mode Standard Mode
8Pin wire PWM_Out
⑥
Buzzer: connect a buzzer here while battery voltage monitor is enabled, buzzer used for a low voltage alarm.
Setting battery voltage in Configuration of
Parameter adjustment, kindly refer to
http://yinyanmodel.com/En/DownView.asp?ID=40
”
Note: MINI version without this connector.







































































