





























EFKA AB286A5400
19
8.3.2
Run-Out Angle for Positioning (System Values D, Group E)
An angle with which the stop point can be moved forward depending upon the set stop position can be set by means of
parameter E2. The positions (1E, 1A, 2E, 2A, 3E, 3A) will not be changed. The preset value for parameter E2 is 6. The
maximum value is 25 increments and can be changed in single increments (i. e. 25 * 1.4° = 35°). Transmission is done at 2
bytes.
8.3.3
Accurate Positioning
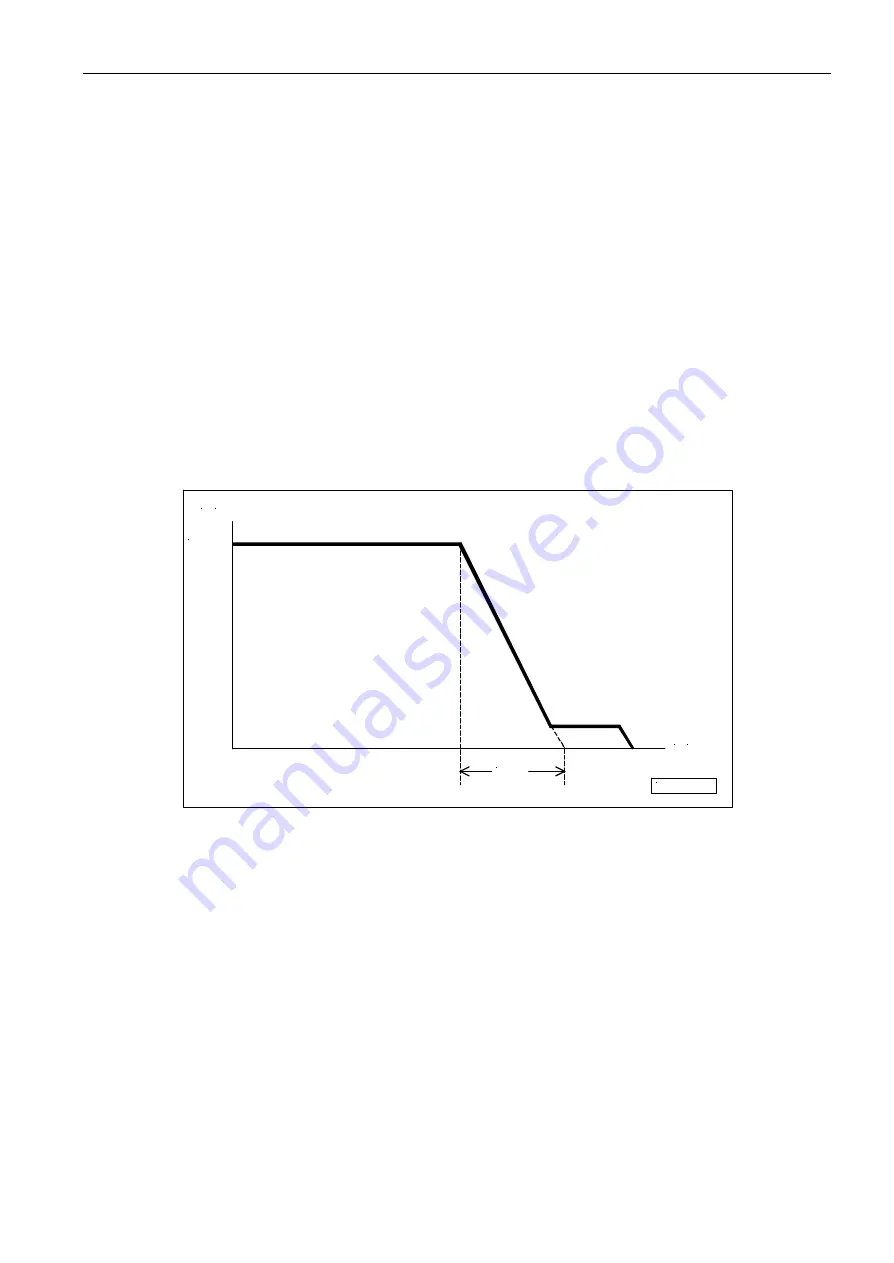
Accurate positioning is time-optimized and reproducible. Ensure that the value of ramp 3 (the preset value in parameter 1A
corresponds to the value in parameter 5A) is lower than the maximum braking ramp determined by the system (3 to 5
[1/min * ms] lower than the maximum value). In order to determine the maximum braking ramp, set the value of ramp 3 to
the maximum (255). The value for ramp 3 is the quotient of speed and braking time (in ms).
In the example, the ramp is the quotient of speed change / time.
4500 [1/min] / 150 [ms] = 30 [1/min * ms]
[1/ min]
n
4500
150
[ms]
t
0 2 7 4 - B 1 2
Summary of Contents for AB286A5400
Page 2: ......