





























45
DMM Technology Corp.
DYN4 AC Servo Drive Instruction Manual
REV. ZM7-A10A
CT1
The DYN4 servo drive features simple 3 parameter Gain tuning to achieve optimized smooth performance.
The user should adjust the servo gain parameters Main Gain, Speed Gain and Integration Gain until they
achieve target response qualities. These parameters are all adjustable using the DMMDRV program, or
by eternal controller via RS232 serial communication.
The overall method of Gain tuning follows as load mass or load inertia increase, the Main Gain and Speed
Gain parameters should be increased. If these are set too high, the servo may be over-tuned and start
vibrating or become noisy. The parameters should be increased/decreased until the motor smoothly
follows command without vibration, noise or oscillations. The Integration Gain increase servo response
stiffness. Integration Gain should be higher for lower load inertia quick, rapid movements (high acceler
-
ation) and lower for higher load inertia slow and sweeping movements (low acceleration). Once the load
becomes smooth and stable,
the user can then fine tune the parameters to make the motor “harder“ (faster
response, more rigid motion) or “softer“ (slower response, smoother motion).
Adaptive Tuning algorithm optimize response time and torque vibration. As long as the 3 gain parameters
are close to ideal settings relative to load inertia, the servo will achieve best response.
The servo motor should be coupled to the final machine before tuning. Make sure during tuning, the motor
is running the load and speed of the final application. The user should use a trial and error method to
achieve the desired servo response.
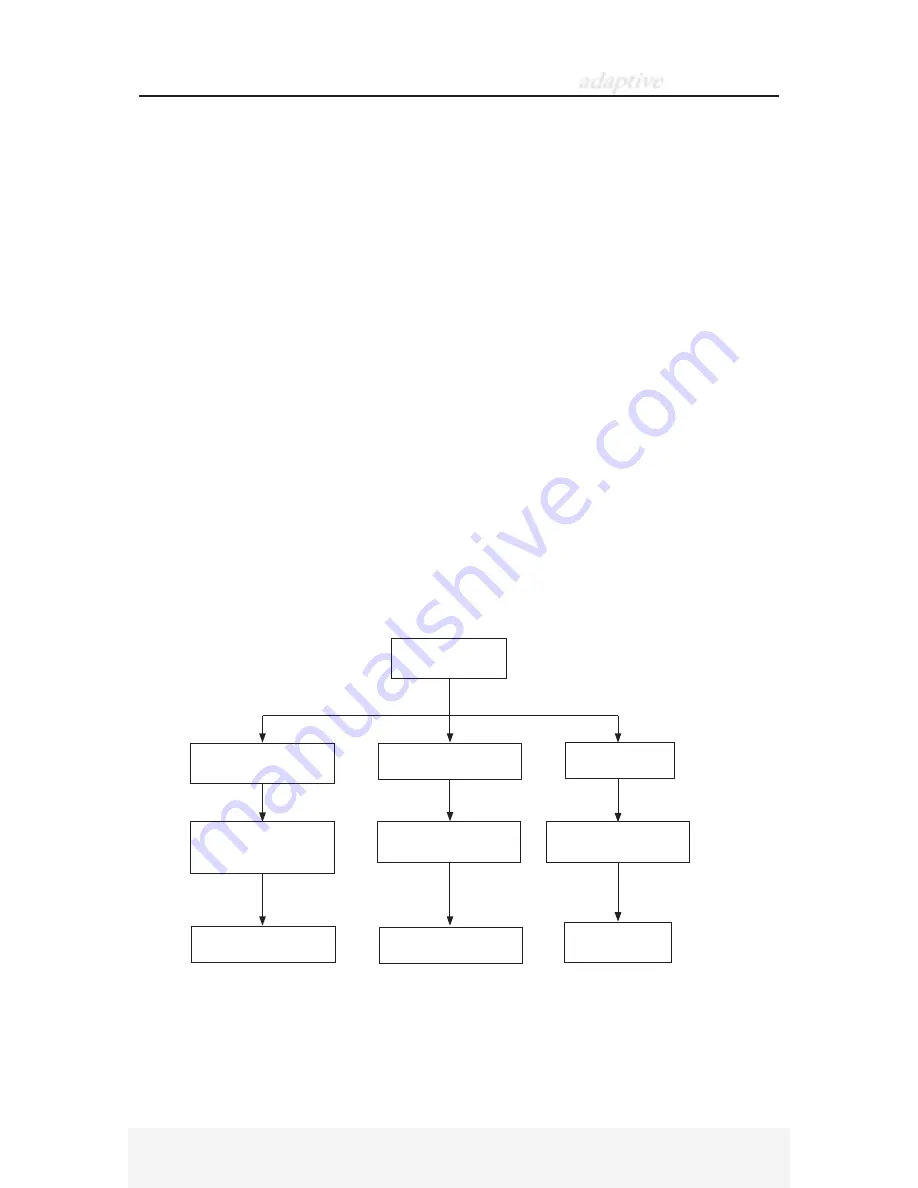
♦ Gain Tuning Procedure Flow
5.2
Servo Drive Gain Tuning
Tuning Begin
Run Servo Motor
Position Overshooting or
Oscillation.
Motor Vibration/Noise
Increase Main Gain,
increase Speed Gain until
overshooting suppressed
Decrease Main Gain,
decrease Speed Gain
Decrease Integration Gain
If still unstable
Unstable/Vibration
Speed/Torque Servo Mode
Decrease
Torque Filter Constant
Decrease Integration Gain
If still unstable
Decrease Main Gain,
decrease Speed Gain
If still unstable
adaptive
adaptive
TUNING II







































































