

























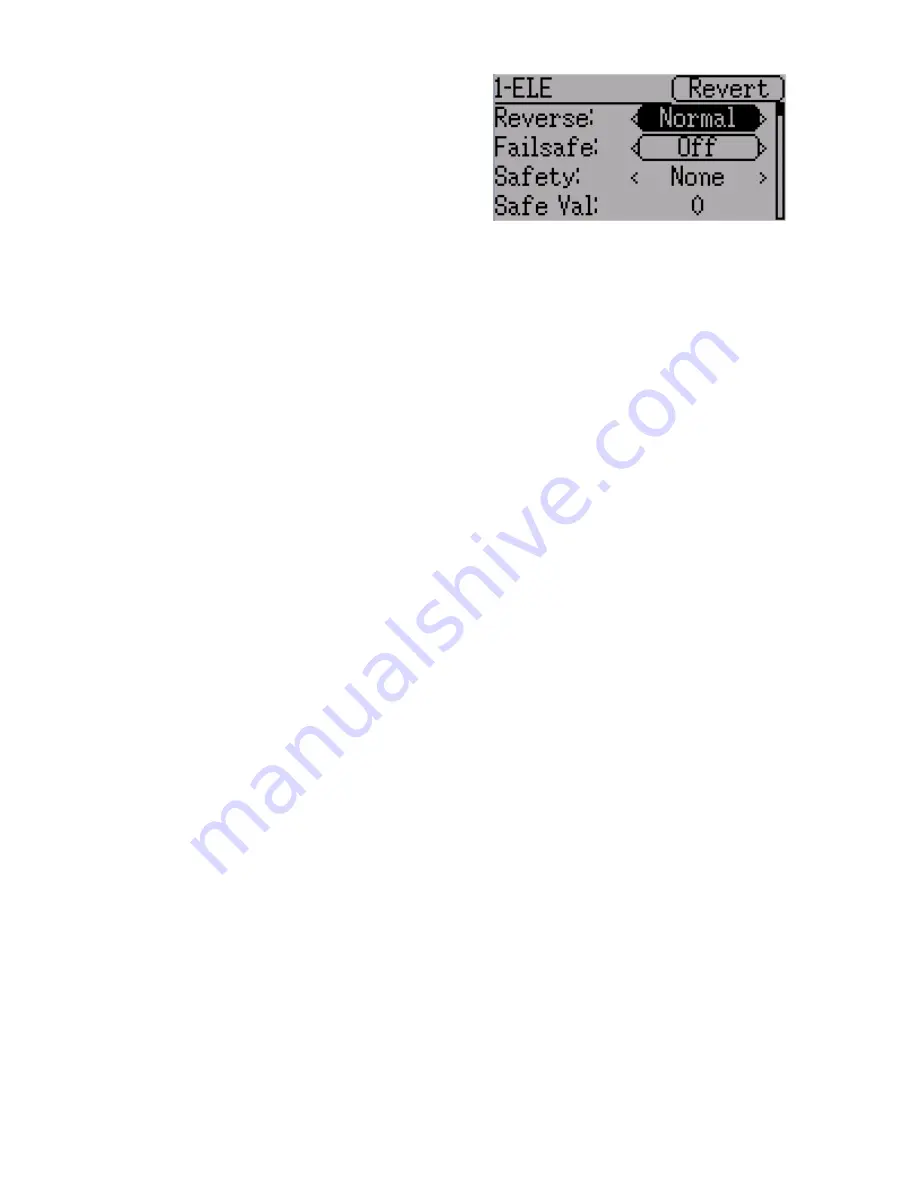
Channel configuration
The Channel configuration provides the
ability to configure the final channel outputs.
Capabilities such as channel reverse and fail-
safe values are applied here. Also available
are controls for end-points, scaling, sub-trim,
and a safety switch (which could be used to
ensure that a motor cannot spin-up while
working on a model)
Changes to this page will immediately effect the channel output. Pressing 'Revert' will
restore the shown values to their saved state.
Reverse
: Reverse the direction of servo rotation
Failsafe
: Specifies a value that the Rx should use when it loses signal from the
transmitter. Not all receivers support this capability.
Safety
: Specifies a switch that will override all mixers and force the channel output to
‘Safe Val’ when flipped.
Min Limit/Max Limit
: These values define the minimum and maximum values that the
transmitter will ever send to the receiver (after all scaling and trims are applied). If a
calculated value is outside the min/max range, it will be clipped to either the min or max
value as appropriate.
Scale+/Scale-
: These values define a final scalar to adjust the servo throw.
Sub-trim
: Adjust servo zero position
Speed
: Adjust maximum servo speed. Zero is disabled (fastest), 1 is slowest, 100 is
fastest rate.
Page | 20







































































