





























26.04.2005
Configuration & control of the AC SuperDrive
Index
Sub-
Index
Name
Description
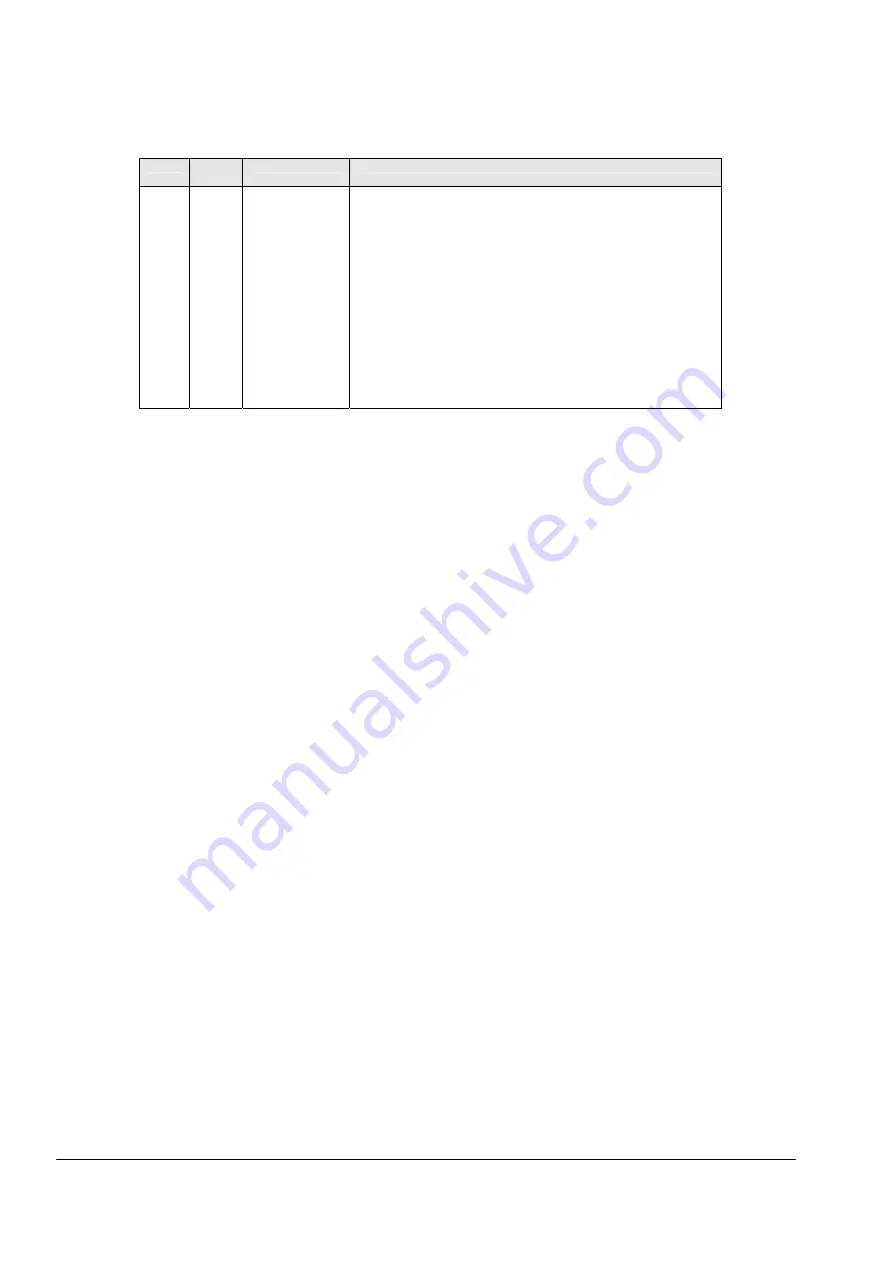
2001h
1
Status Word
Bit 0
Ready To Switch On (Dc bus is charged)
Bit 1
Switched On (Main contactor, if used, is on)
Bit 2
Operation Enabled (Power stage is enabled)
Bit 3
Error
Bits 4-5 Reserved
Bit 6
Switch On Disabled (Dc bus voltage to low, charging
timeout)
Bit 7
Warning
Bit 8
Regeneration (Power flow is from ACS to battery)
Bit 9
Speed Sensor Warning Active
Bit 10
BDI Magnetisation Current Pulse Enabled (Option)
Bit 11
Linear Current Rollback Active
Bit 12
Open Drain Output 1 On
Bit 13
Open Drain Output 2 On
Bit 14
Foot Brake Active
Bit 15
Default Parameters
Table 7. The Command Word and the Status Word.
The sequence to initiate the CANopen communication and to enable the operation of the ACS is
described in the following:
1. Send the NMT message Start Remote Node to the ACS. The CANopen state of the ACS will
become OPERATIONAL. Prior to this it is however possible to use the SDO object in order to
configure ACS parameters.
2. Start up the PDO objects, i.e. start sending the PDO to the ACS (PDO1Rx) and start
receiving the PDO from the ACS (PDO1Tx). If the SYNC object is used then also start to
send that. The transmit period of PDO1Rx and SYNC, if used, shall be between 8 to 20 ms.
The transmit period of the PDO1Tx in the ACS depends on the Transmission Type.
If a second PDO is used, i.e. PDO2Rx and/or PDO2Tx, this service shall also be started.
Note: Once the CANopen state of the ACS becomes OPERATIONAL (via the NMT message
Start Remote Node), PDO communication must start within one second. Once the first
PDORx is received, subsequent PDORx's must be received at an interval not longer than
specified by the PDO Timeout parameters (Index 5F04h:3-4). The SYNC object, if used, must
occur at an interval not longer than specified by the Sync Timeout parameter (Index
5F04h:2).
3. Wait until the bit Ready To Switch On (Bit 0) is set in the Status Word, i.e. the Dc Bus is
charged. Then the bit Switch On (Bit 0) in the Command Word shall be set and this even if
the main contactor mode is not used. The ACS confirms this by setting the bit Switched On
(Bit 1) in the Status Word. Clearing the bit Switch On does not change the status of the ACS,
i.e. the bit Switched On cannot be reset if it has been set.
4. At the same time or after the bit Switch On is set, it is possible to enable the ACS by setting
the bit Enable Operation (Bit 3) in the Command Word. The ACS confirms this by setting the
bit Operation Enabled (Bit 2) in the Status Word.
5. The ACS can be disabled at any time by clearing the bit Enable Operation in the Command
Word. The ACS confirms this by resetting the bit Operation Enabled in the Status Word. If the
automatic drive disable function is enabled (see Index 2020h:9), the Operation Enabled bit is
reset when this function disables the ACS power stage.
6. If an Error condition occurs, the ACS is disabled and this is reflected in that the bit Operation
Enabled is cleared at the same time as the bit Error is set in the Status Word. The ACS also
sends an EMCY message.
User's Guide 1.0
Item No.
89Y05120A
43
Summary of Contents for SuperDrive ACS24 Series
Page 12: ......
Page 34: ......
Page 38: ......
Page 79: ...26 04 2005 Troubleshooting guide User s Guide 1 0 Item No 89Y05120A 79...
Page 81: ...26 04 2005 Troubleshooting guide User s Guide 1 0 Item No 89Y05120A 81...
Page 82: ...Troubleshooting guide 26 04 2005 Item No 89Y05120A User s Guide 1 0 82...
Page 92: ......







































































