





























CY8CKIT-026 CAN and LIN Shield Kit Guide, Doc. No. 002-03798 Rev. *C
34
Kit Operation
4.4
LIN Communication Hardware Setup
1. Connect the CAN and LIN Shield Kit to the Arduino header of the CY8CKIT-044/042 Pioneer Kit,
as shown in
.
2. Connect the LIN TX, LIN RX pins and Enable/sleep control pin (GPIO) of the controller (comes
from the baseboard via the Arduino header) to LINx_TX, LINx_RX and LINx_NSLP pins (on J15
connector for LIN1 transceiver, J6 connector of LIN2 transceiver) of the LIN transceiver circuit
using connecting wires.
shows how to connect the Arduino pins to the LINx transceiver using wires.
These connection are only if you are using P4.0 and P4.1 as LIN pins on the microcontroller. If
you are using different pins for LIN, the corresponding pin connections on the Arduino header
must be changed.
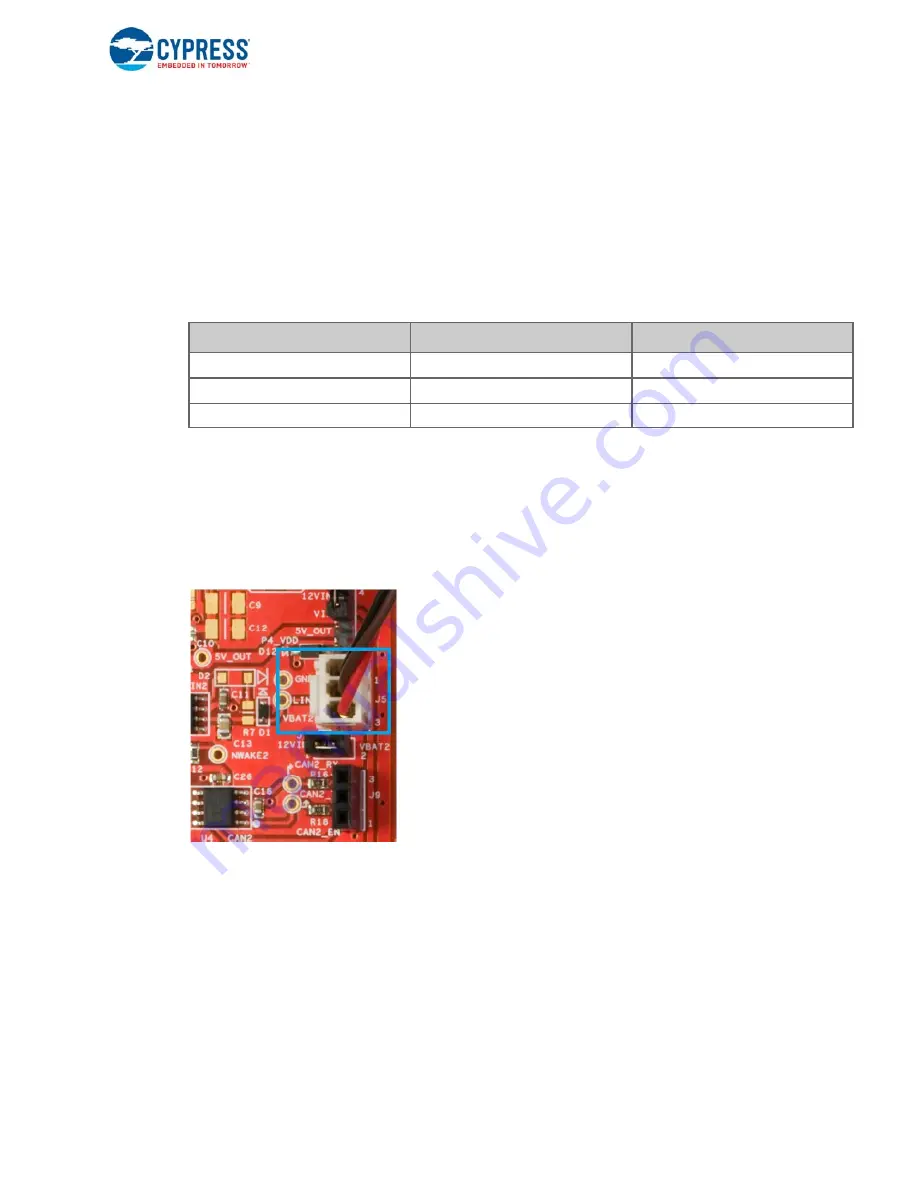
3. Connect VBAT, LIN bus, and GND of the LIN analyzer/LIN master to either J14 connector for
LIN1 transceiver circuit or J5 connector for LIN2 transceiver circuit of Shield Kit, as shown in
for details of LIN bus connectors.
Figure 4-4. Connect to LIN Bus Connector
4. Connect a 12 V power supply input to the Shield Kit using any of the supply option described in
, and power the baseboard by populating the power selection
jumper explained in
Power Selection Jumper (J20) on page 28
Table 4-3. Ardunio Header Connection to LIN Transceivers
Arduino Pin
LIN1 Transceiver
LIN2 Transceiver
J3_10 (SCL)
J15_1 (LIN1_RX)
J6_1 (LIN2_RX)
J3_9 (SDA)
J15_2 (LIN1_TX)
J6_2 (LIN2_TX)
J2_13
J15_3 (LIN1_NSLP)
J6_3 (LIN2_NSLP)