





























CY8CKIT-026 CAN and LIN Shield Kit Guide, Doc. No. 002-03798 Rev. *C
17
Hardware
3.2
CAN Physical Layer Transceiver Circuits
The CY8CKIT-026 has two CAN transceivers: one is low speed (up to 125 Kbps baud rate) and fault
tolerant, and the other is high speed (up to 2 Mbps baud rate). The PSoC 4M device supports two
CAN modules, so these two transceivers enable you to use both of them to connect to CAN net-
works.
The CAN physical layer transceiver circuits (CAN1 Transceiver and CAN2 Transceiver) on the shield
board use TJA1055T and TJA1051T CAN transceiver devices. These devices translate differential
CAN bus signals to and from digital CMOS signals.
■
CAN1 Transceiver (TJA1055T)
Three signals are used between this circuit and the CAN (PSoC 4) controller. These signals are
CAN1_RX, CAN1_TX, and CAN1_ERR. Data signals on the CAN bus are driven to the PSoC
CAN1_RX signal. Data signals on the PSoC CAN1_TX signal are driven onto the CAN bus. The
CAN1_ER signal is used to indicate an error event. See the
device datasheet for details
on each of these three pins of the CAN transceiver.
■
CAN2 Transceiver (TJA1051T)
Three signals are used between this circuit and the CAN (PSoC 4) controller. These signals are
CAN_RX, CAN_TX, and CAN_EN. Data signals on the CAN bus are driven to the PSoC CAN2_RX
signal. Data signals on the PSoC CAN2_TX signal are driven onto the CAN bus. The CAN_EN
signal enables and disables the CAN transceiver. See the
device datasheet for details on
each of these three pins of the CAN transceiver.
3.2.1
CAN Bus Clock Accuracy
For accurate CAN communication, a CAN controller device must typically have a clock source with a
frequency tolerance of 0.5% or less for bit-rates faster than 125 Kbps and at least 1.58% for
125 Kbps or slower bit-rates. Therefore, the device used as the CAN controller must meet this
requirement. Otherwise, an external clock source that is more accurate must be used. But, PSoC 4
has a great feature where you can trim the internal IMO clock up to 0.5% accuracy. See
code example for details on the clock configuration of this kit's code examples.
3.2.2
CAN Bus Connector
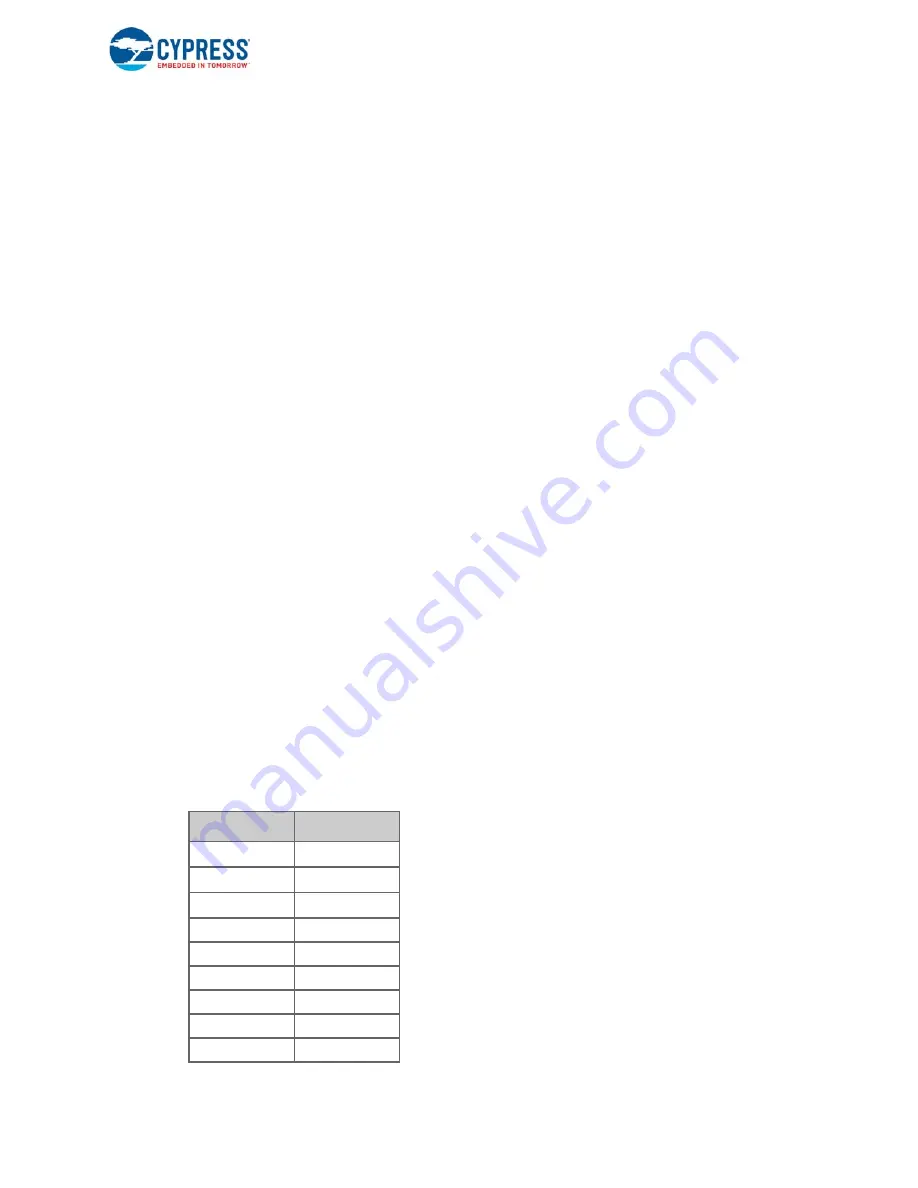
shows the pinout of the CAN DB9 connectors (J8 and J17) on the shield board. The CAN
Bus connectors (DB9 connectors) for the two transceiver circuits have the same pin configuration.
Table 3-1. CAN Connector Point
Pin
Signal
1
NC
2
CAN_L
3
GND
4
NC
5
NC
6
GND
7
CAN_H
8
NC
9
NC (VIN = 12 V)







































































