





























3 — PROGRAMMABLE PARAMETERS
pg. 21
1212 & 1212P Manual - Sep 2019
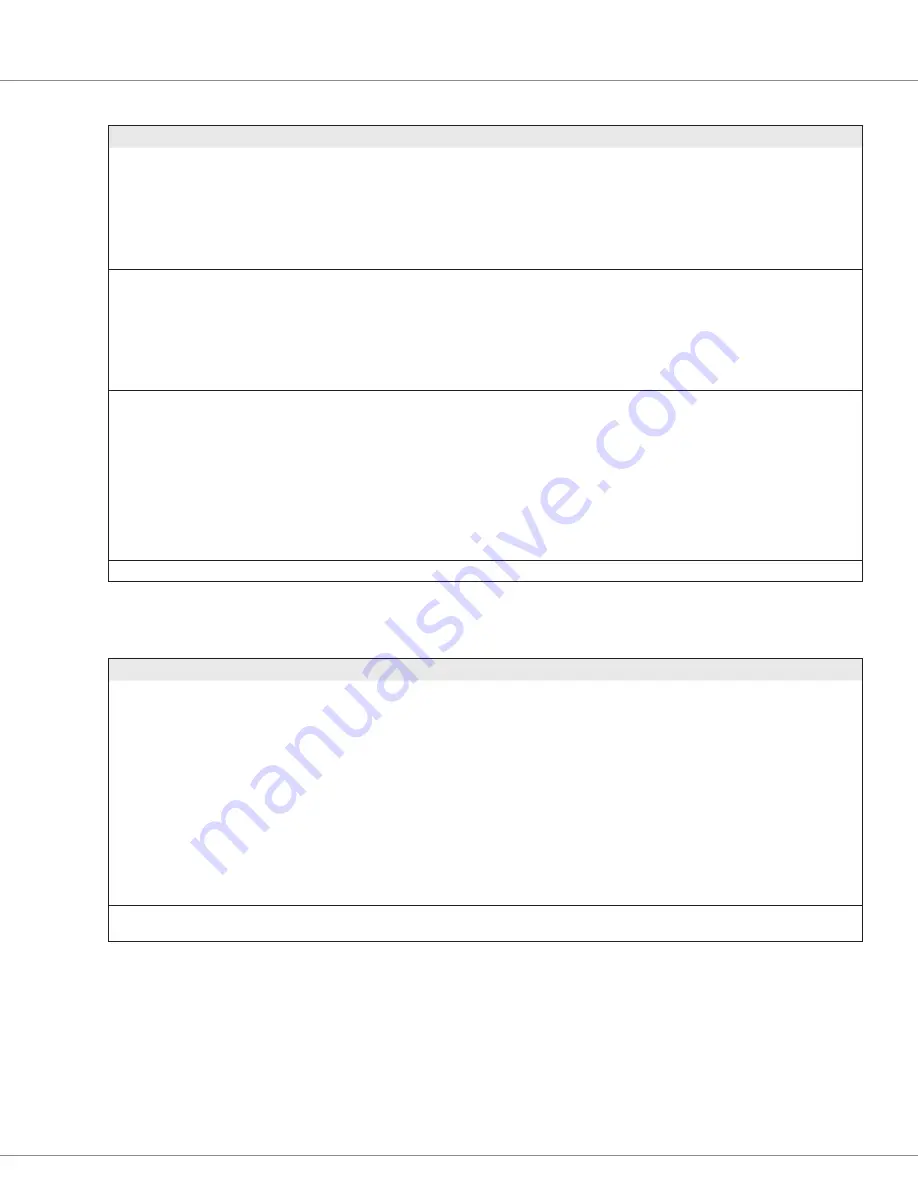
CURRENT MENU
PARAMETER
ALLOWABLE RANGE
DESCRIPTION
Main Current Limit
model dependant
Sets the maximum current the controller will supply to the motor during
normal driving. By limiting the current supplied, this parameter can be used
to protect the motor from potentially damaging currents or to reduce the
maximum torque applied to the drive system.
For 1212-22xx controllers, it is adjustable from 10 to 45 amperes.
For 1212-24xx controllers, it is adjustable from 15 to 70 amperes.
For 1212P controllers, it is adjustable from 15 to 90 amperes.
Braking Current Limit
model dependant
Sets the maximum current the controller will supply to the motor during
braking. By limiting the current supplied, this parameter can be used to
protect the motor from potentially damaging currents or to reduce the
maximum braking torque applied to the drive system.
For 1212-22xx controllers, it is adjustable from 10 to 45 amperes.
For 1212-24xx controllers, it is adjustable from 15 to 70 amperes.
For 1212P controllers, it is adjustable from 15 to 90 amperes.
Boost Current
model dependant
Boost current gives a brief boost of current that greatly improves performance
with transient loads, such as starting on a hill, crossing a threshold, climbing
obstacles, etc. When the controller recognizes that the motor needs more
current to respond to a drive request, it provides a cur-rent boost of a set
amount for a set time.
The Boost Current parameter defines the motor current limit during the boost
period.
For 1212-22xx controllers, it is adjustable from 10 to 55 amperes.
For 1212-24xx controllers, it is adjustable from 15 to 80 amperes.
For 1212P controllers, it is adjustable from 15 to 90 amperes.
Boost Time
0–10 s
This parameter sets the maximum time that the boost current is allowed.
INHIBIT MENU
PARAMETER
ALLOWABLE RANGE
DESCRIPTION
Type
0–5
The flexible speed input at J1 Pin 6 can be used to limit or to inhibit speed
under certain conditions. For example, a switch could be installed under the
seat so that if the operator drives the scooter while they are standing the max
speed will be limited.
The Inhibit Type parameter is used to select how the inhibit function will be
implemented. Depending on how the inhibit switch is wired into the system,
set this parameter to:
0 = B− active
1 = B+ active
2 = Open circuit active
3 = B− inactive
4 = B+ inactive
5 = Open circuit inactive.
Speed
0–100 %
This parameter limits the maximum speed allowed during speed inhibit mode.
A setting of 0 prevents drive during inhibit mode.







































































