Chapter 2
2-33
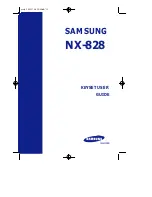
F-2-26
The CPU (IC1) of the ADF controller PCB receives commands from the host machine for
print mode (e.g., magnification, operation, timing). In response, it sends drive pulses to the
pickup motor.
The pickup motor is a stepping motor, and changes the order and frequency of its drive
pulses (OUTA, OUTA*, OUTB, OUTB*) to change the direction and speed of motor
rotation.
T-2-10
Signal
Description
PMOT_A
Drive pulse A
PMOT_A*
Drive pulse A (reverse phase)
PMOT_B
Drive pulse B
PMOT_B*
Drive pulse B (reverse phase)
PMOT_V-REF
Reference current level setting
IC8
Motor
driver
+24V
OUTA
OUTA*
OUTB
OUTB*
M2
J8
3
4
1
5
6
2
IC1
CPU
PMOT_B
PMOT_B*
PMOT_
A
PMOT_
A*
PMOT_V-REF
ADF controller PCB
Summary of Contents for DADF-N1
Page 12: ...Chapter 1 Specifications ...
Page 20: ...Chapter 2 Functions ...
Page 37: ...Chapter 2 2 15 F 2 12 Arching Standby for reading Reading of face Delivery Job end ...
Page 67: ...Chapter 3 Parts Replacement Procedure ...
Page 162: ...Chapter 4 Maintenance ...
Page 166: ...Chapter 4 4 3 Be sure to push in the stamp until a click is felt Otherwise jams can occur ...
Page 170: ...F 4 5 F 4 6 1 22 20 24 26 16 21 23 25 27 ...
Page 187: ...F 4 32 VR1 SL1 SL2 M2 PCB1 PCB2 M1 CL1 Chapter 4 4 24 ...
Page 190: ...Chapter 5 Error Code ...
Page 197: ...Appendix ...
Page 199: ......