
















EX200 Electro-Hydraulic Actuator Positioner
Bifold Orange Limited.
Drwg. No.: ORM0001 Issue : 1 Date : 24/06/2015 Page :
6 of 20
The solenoid sense and command signal default mode are set up by internal jumper links according to the part number
selected during ordering. Check the accompanying Certificate of Calibration/Conformity for the factory setting of the
jumper links. If a change is required, then the top cover of the instrument has to be removed to access the links:
1) If the instrument is difficult to access, make a note of the wiring, disconnect and remove the EX200 from its
enclosure.
2) If the unit is housed with the EXD2010 Ex d enclosure ensure that there is no hazardous atmosphere present and
remove the lid from the EXD2010 Ex d enclosure.
3) Work in a clean, dry area and use electrostatic discharge protection equipment - a wrist strap and a grounded
work mat to make the changes.
4) Unscrew the two M2.5x5 screws from the top of the instrument.
5) For the Din Rail Mount enclosure, gently push in one of the black fixing lugs on the side of the top cover and
remove the cover.
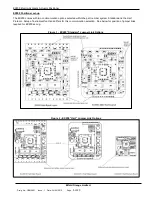
6) Check with the layout drawings on page 4, Figure 1 for Standard communication, Figure 2 for Hart
Communication, for position of jumper links on the base printed circuit board and make the necessary changes.
Note that ONLY one selection, + or -, MUST be made for each of the output blocks - LINC LDEC LESD LFLT
even if the fault or ESD outputs are not used.
7) Double check and record the selection then reverse the above procedure to reassemble the EX200.
Setting solenoid operating sense
If the actuator has a spring assisted return to a default position it may be necessary to change the sense of the output
solenoid such that at the desired balance point one of the solenoids is energised thus holding the actuator position
against the spring. Follow the procedure described in Positioner set-up above and select between LDEC +/- and LINC +/-
links for the required solenoid sense.
The default EX200 supply is for a double acting actuator, to select a factory set unit for a spring to close actuator please
add “SC” where indicated in the part number selection chart, and for spring to open add “SO”.
Setting retransmitted actual position signal drive type
– Sourcing or Sinking
Links SO and SI can select the excitation for the retransmitted actual position signal. Link SO selects INTERNAL 12V
excitation and Link SI selects EXTERNAL 12-30V excitation. Only select ONE excitation drive type. For the EX200 with
Hart communication option, link both SO or both SI links.
The default EX200 supply is for a sourcing retransmitted signal, to select a factory set unit for a sinking retransmission
add “SK” where indicated in the part number selection chart.
Setting the auxiliary solenoid and fault output sense
These two outputs can respond to failures in the control signals to the system and an external fault input. The EX200
normally sets these two outputs as energised when healthy but the sense of the outputs can be reversed by following the
procedure described in Positioner set-up above and selecting between LESD +/- (auxiliary solenoid) and LFLT +/- (fault
output) links for the required outputs. The LESD auxiliary output is linked to the OK light on the front of the EX200
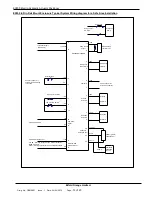
Setting the command signal break default operation
In the event of a command or feedback signal break or, if selected, an external fault, then the actuator can be forced to
one of three default conditions - freeze operation, drive down or drive up. These faults are characterised as:
a) the command falling below 1mA - command signal break
b) the potentiometer wiper showing less than 0.25V - potentiometer maximum or wiper break
c) the potentiometer wiper showing more than 4.7V - potentiometer minimum break.
For the EX200 with “Standard” Communication option follow the procedure described in Positioner set-up above and
select from positions A and B on link block LK1 as follows:
A
B
Function
Out
Out
Freeze mode on signal fault
In
Out
Drive down on signal fault
Out
In
Drive up on signal fault
In
In
Freeze mode again
For the EX200 with “Hart” Communication these are set on power up and not using links as per the above. A one-off
operation of the positioner will store the choice in non-volatile EEPROM memory.


























































