Beijing ART Tech PCI1040, User Manual
The Beijing ART Tech PCI1040 product user manual is available for free download on our website. This comprehensive manual provides detailed instructions on how to maximize the features and functionalities of the product. Download the user manual from manualshive.com to ensure smooth operation and optimal performance.
Share
Download

















Reviews:
No comments
Related manuals for PCI1040
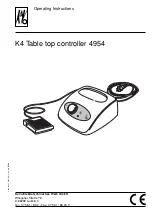
K4
Brand: KaVo Pages: 13

K3
Brand: vc999 Pages: 52

Electraray 225
Brand: Federal Signal Corporation Pages: 12

P18
Brand: JB-Lighting Pages: 32

MS
Brand: W&H Pages: 72

QK-A031
Brand: Quark-Elec Pages: 2

Neon Series
Brand: Ultrawave Pages: 30

PD1 series
Brand: Ultrasound Technologies Pages: 12

VAM250FC
Brand: Daikin Pages: 12

RSE625RSIB
Brand: Napoleon Pages: 3

LREN8A7Y1B
Brand: Daikin Pages: 52

BoneSTATION
Brand: Milestone Pages: 64

Serious Steel 805106
Brand: ParaBody Pages: 6

Z33-D060.02 S2A
Brand: Jäger Pages: 36

Royal Squat Rack SX-5 II
Brand: KingsBox Pages: 5

PHD50
Brand: TOPMAQ Pages: 13

1520 9001
Brand: Pfeuffer Pages: 32

AHRS-E304
Brand: WATSON INDUSTRIES Pages: 17





















































