





























BTL5-T110...
Configuration and Profibus Connection –
Transducer Class 3/4
english
10
4
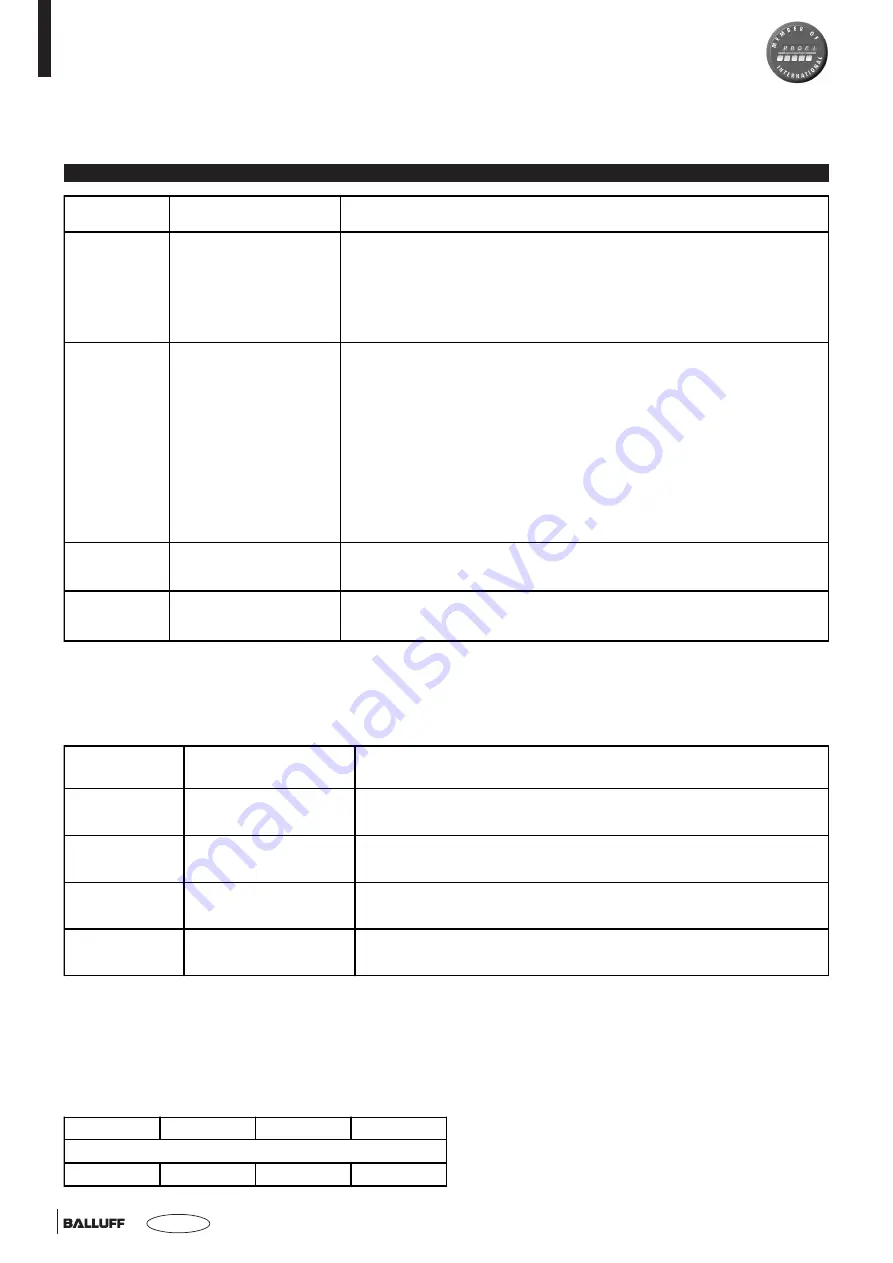
Transmitting data in Data_Exchange (cont.)
Table 4-2: Error codes in G1_XIST2
4.1
Data format for position and velocity
The current transducer data are prepared as data type DWORD (position, velocity).
Data structure for each DWORD:
Description of error codes in G1_XIST2
Table 4-1: Status and control words
Abbreviation
Short description
Description
ZSW2
Status Word 2
Bit 0 - 11 not used
Bit 12 - 15 Slave sign-of-life
4-bit counter, flush left.
The slave application starts the slave sign-of-life at any desired value
between 1 and 15 after successful synchronization with the clock. The
counter is incremented by the slave in each DP cycle. The value range is 1
to 15, the value 0 indicates an error and is skipped if there is no error.
G1_ZSW1
Sensor 1 Control Word
Bits 0 – 10 reserved
Bit 11 Acknowledgement encoder error in process
Is set if resetting an error after acknowledgement takes longer than one bus
cycle.
Bit 12 Confirmation Set Preset / Write Value
Confirmation if an offset is set.
Bit 13 Confirmation Transmission of Actual Value 2
Independent on Bit 13 in G1_STW, the encoder transmits the absolute
value in G1_XIST2.
Bit 14 Confirmation Park Encoder
Confirmation Park Encoder: Encoder does not issue error messages.
Bit 15 Encoder Error
Indicates an encoder error. Error code is output in G1_XIST2.
G1_XIST1
Sensor 1 actual
Position 1
Raw value of 1st magnet
G1_XIST2
Sensor 1 actual
Position 2/ Error display
G1_XIST2 shows the raw value, respectively at set Preset the position value
is Preset afflicted. At appearance of the encoder error, the error code
appears instead of the raw value of Magnet 1.
G1_XIST2 (value)
Short description
Description
0x00000001
Sensor error
Error in processing the transducer signal which resulted in invalid value
G1_XIST1.
0x00000f01
Command not
supported
Error due to a non-supported optional function (e.g. reference point
search)
0x00000f02
Sign-of-life error
The sign-of-life counter of the master has shown more than the indicated
errors.
0x00000f04
Synchronization error
In isochronous mode it was not possible for the sensor to synchronize.
Byte 0
Byte 1
Byte 2
Byte 3
Position / Velocity
LSB
MSB







































































