








4.5 - SINGLE ACTION PID CONTROL (1.rEG)
All the parameters referring to PID control are contained in the
group
“
]
rEG”.
The Single Action PID control can be obtained by programming
par.
"Cont"
= Pid and works on the output 1.rEG depending on the
Set Point
“SP1”
, on the functioning mode
"Func”
and on the
instrument’s PID algorithm.
0 N
t c r 1
1 . r E G
( H E a t )
S P 1
P V
t c r 1
o f f
t c r 1
t c r 1
t c r 1
t c r 1
0 N
o f f
o f f
0 N
o f f
o f f
0 N
0 N
t c r 1
o f f
0 N
0 N
t i m e
O U T
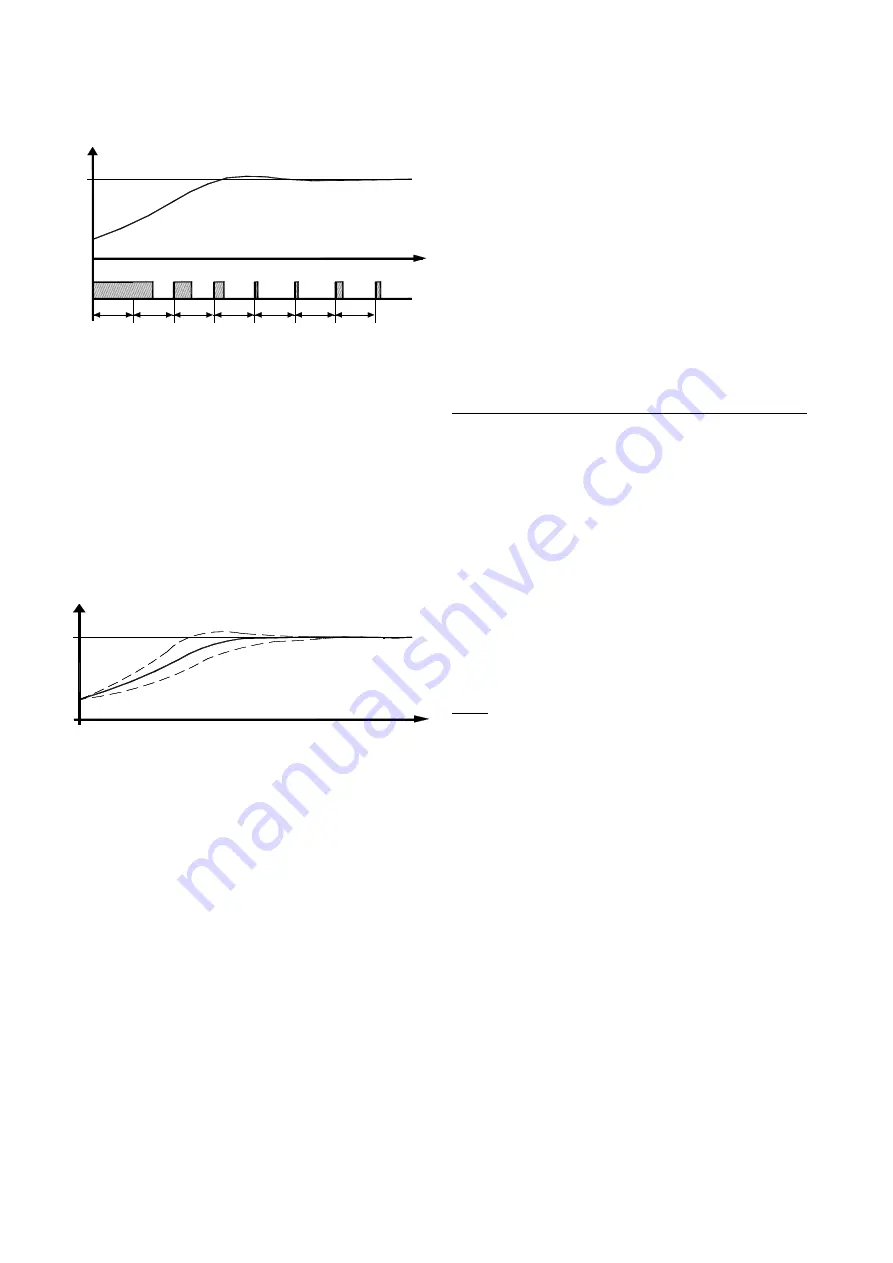
In order to obtain good stability of the process variable, in the event
of fast processes, the cycle time “tcr1” has to have a low value with
a very frequent intervention of the control output.
In this case use of a solid state relay (SSR) is recommended for
driving the actuator.
The Single Action PID control algorithm foresees the setting of the
following parameters :
"Pb"
- Proportional Band
"tcr1"
- Cycle time of the output 1.rEG
"Int"
- Integral Time
"rS"
- Manual Reset (if “Int =0 only)
"dEr"
- Derivative Time
“FuOC” -
Fuzzy Overshoot Control
This last parameter allows the variable overshoots at the start up of
the process or at the changing of the Set Point to be avoided.
Please remember that a low value on this parameter reduces the
overshoot while a high value increase it.
2
1
3
S P 1
P V
t i m e
1: Value “FuOC” OK
2: Value “FuOC” too high
3: Value “FuOC” too low
4.6 - DOUBLE ACTION PID CONTROL (1.rEG - 2.rEG)
All the parameters referring to PID control are contained in the
group
“
]
rEG”.
The Double Action PID control is used to control plants where there
is an element which causes a positive increase (ex. Heating) and an
element which causes a negative increase (ex. Cooling).
This type of control can be obtained when 2 outputs are
programmed respectively as 1.rEG and 2.rEG and the par.
“Cont”
= Pid.
The element causing a positive increase has to be connected to the
output programmed as 1.rEG while the element causing a negative
increase has to be connected to the output programmed as 2.rEG.
The Double Action PID control works on the outputs 1.rEG and
2.rEG depending on the Set Point
“SP1”
and on the instrument’s
PID algorithm.
In order to obtain good stability of the process variable, in case of
fast processes, the cycle times “tcr1” and “tcr2” have to have a low
value with a very frequent intervention of the control outputs.
In this case use of solid state relays (SSR) to drive the actuators is
recommended.
The Double Action PID control algorithm needs the programming of
the following parameters :
"Pb"
- Proportional Band
"tcr1"
- Cycle time of the output 1.rEG
“tcr 2”
- Cycle time of the output 2.rEG
"Int"
- Integral Time
"rS"
- Manual Reset (if “Int =0 only)
"dEr"
- Derivative Time
“FuOC” -
Fuzzy Overshoot Control
"Prat"
- Power Ratio or relation between power of the element
controlled by output 2.rEG and power of the element controlled by
output 1.rEG.
4.7 - AUTOTUNING FUNCTION
All the parameters referring to the AUTOTUNING function are
contained in the group
“
]
rEG”.
The
AUTO-TUNING
function (
FAST
or
OSCILLATING
type)
permits the calculation of the PID parameters by means of a tuning
cycle and, at the end of this operation, the parameters are stored
into the instrument’s memory and remain constant during control.
Both modes calculate the following parameters automatically:
“Pb”
- Proportional band
“tcr1”
- output cycle time
“Int”
- integral time
“dEr”
- derivative time
“FuOC” -
Fuzzy Overshoot Control
To activate the AUTOTUNING function, proceed as follows:
1) Set the Set point
“SP1"
desired.
2) Set the parameter
"Cont" =Pid.
3) Program par. "Func" according to the process to be controlled
through output 1.rEG.
4) Program an output as 2.rEG if the instrument controls a plant with
double action
5) Set the parameter
"Auto"
as:
= 1
- if the autotuning is to be started automatically each time the
instrument is turned on.
= 2
- if the autotuning is to be started automatically when the
instrument is turned on the next time and, once tuning has been
completed, the parameter “Auto"=OFF is set automatically.
= 3
- if autotuning is started up manually, by the key U
= 4
- if autotuning is to be started automatically each time the
regulation set is changed.
6) Set the parameter
"SEL.A"
as:
= FASt
- for FAST mode autotuning
= OSC
- for OSCILLATING mode autotuning
Note: the Autotuning Fast type is particularly rapid and has no effect
on the control as it calculates the parameters during the Set Point
reaching phase.
In order to correctly perform the Autotuning Fast type it’s necessary
that at the start of the cycle there is a certain difference between the
process and the Set Point and for this reason the instrument
activates the Autotuning Fast type only when :
- For “Auto” = 1 or 2: the process value is lower (with “Func” =HEAt)
than [SP- |SP/2|] or higher (with “Func” =CooL) than [SP+ |SP/2|].
- For “Auto” = 3 or 4 : the process value is lower (with “Func”
=HEAt) than [SP- |SP/5|] or higher (with “Func” =CooL) than [SP+
|SP/5|].
The Autotuning Fast type is not advisable when the Set Point is next
to the initial reading or when the measured variable changes
irregularly during the tuning cycle (for reasons due to the process
the variable goes up or down).
In this cases we advice the Autotuning oscillatory type that activates
some ON-OFF control cycles permitting the oscillation of the
process value around the Se Point value and afterward the control
swap to the PID type with those values calculated by the
Autotuning.
7) Exit the parameter programming mode.
8) Connect the instrument to the controlled system.
9) Start up autotuning turning off and on the machine if “Auto" = 1 or
2, pressing the key U if “Auto" = 3, or by varying the Set value if
“Auto" = 4.
At this point, the Autotuning function is started up and is marked by
the turning on of the led AT/ST.
Ascon Tecnologic - TLK 72 B - OPERATING INSTRUCTIONS -
PAG. 5







































































