ARRIMOTION User’s Guide, 01/2004
Page 134 of 162
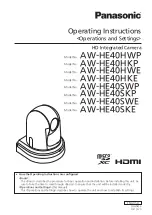
5.7. Auxiliary Motor Control Box ACB-1
The ACB is used to control up to 3 external servo motors with external servo amplifiers. It is also
possible to control other equipment (like a dolly, for instance) equipped with a CAN bus interface.
The ACB can control a total of three axes. If one axis is controlled over the CAN bus, only two of the
AUX connectors can be used.
CAN-AUX
Connector
AUX1 Connector
Status LED
AUX2 Connector
Status LED
AUX3 Connector
Status LED
CAN-AUX Connector
Any ARRIMOTION compatible equipment using the CAN bus can be connected to the CAN-AUX
connector.
Status LEDs
The status of each axis is displayed here.
LED
Meaning
Off
Axis turned off
Green
Motor is ready
Green blinking
Motor is ready, but at the end stop
Red blinking
Error. Detailed information is displayed on the Jogbox.
Red/green alternating Homing in process
Summary of Contents for ARRIMOTION
Page 2: ...ARRIMOTION User s Guide 01 2004 Page 2 of 162 This page has been intentionally left blank ...
Page 5: ...ARRIMOTION User s Guide 01 2004 Page 5 of 162 ...
Page 6: ...ARRIMOTION User s Guide 01 2004 Page 6 of 162 This page has been intentionally left blank ...
Page 12: ...ARRIMOTION User s Guide 01 2004 Page 12 of 162 1 Introduction ...
Page 21: ...ARRIMOTION User s Guide 01 2004 Page 21 of 162 This page has been intentionally left blank ...
Page 22: ...ARRIMOTION User s Guide 01 2004 Page 22 of 162 2 Setup ...
Page 37: ...ARRIMOTION User s Guide 01 2004 Page 37 of 162 3 Operation ...
Page 57: ...ARRIMOTION User s Guide 01 2004 Page 57 of 162 ...
Page 79: ...ARRIMOTION User s Guide 01 2004 Page 79 of 162 ...
Page 80: ...ARRIMOTION User s Guide 01 2004 Page 80 of 162 4 Software Reference ...
Page 120: ...ARRIMOTION User s Guide 01 2004 Page 120 of 162 5 Hardware Reference ...