




























14
GPS Course [deg]
Course over ground, NOT heading
GPS Satellite Count
"Visible" number of satellites
GPS Valid
1 = Valid Fix, 0 = No Fix
GPS Year
UTC Time
GPS Month
UTC Time
GPS Day
UTC Time
GPS Hours
UTC Time
GPS Minutes
UTC Time
GPS Seconds
UTC Time
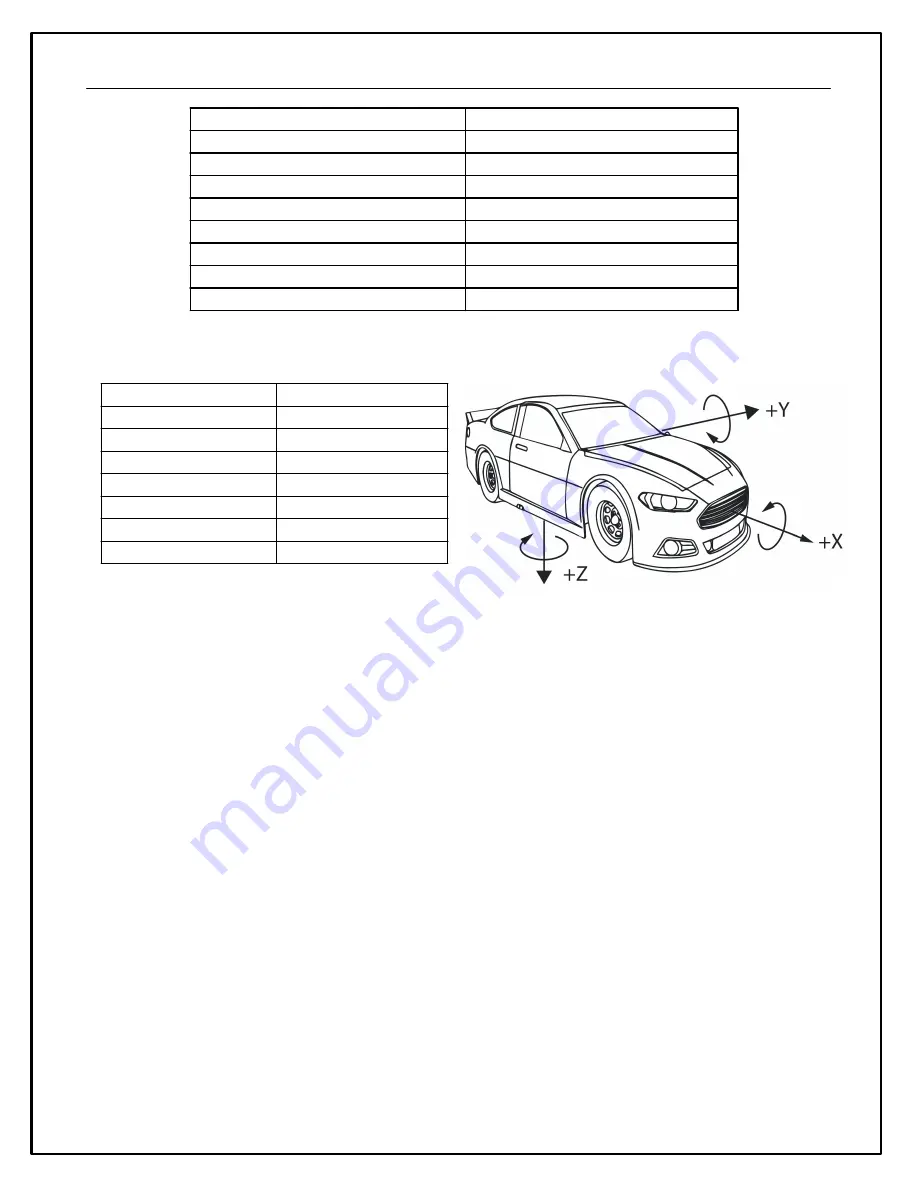
Accelerometer / Gyroscope
The following accelerations and yaw rate channels are output on AEMnet for logging on your Infinity ECU or other
device:
Channel Name
Notes
Acceleration X [g]
*Longitudinal
Acceleration Y [g]
*Lateral
Acceleration Z [g]
*Vertical
YawRate X [deg/s]
*Roll
YawRate Y [deg/s]
*Pitch
YawRate Z [deg/s]
*Yaw
*If +x is mounted in the direction of travel
Air/Fuel Sensors and Devices to Dash
The AEMNet CAN message transmission is enabled by default on the following devices. Refer to your harness
documentation to identify the CAN terminals.
30-03X0 X-Series UEGO
30-4900 Wideband Failsafe
30-4911 Flex Fuel Failsafe
30-2340 4Ch UEGO
Series 2 EMS and EMS-4 to Dash
The AEMNet CAN output must be enabled in your ECU before the dash can receive messages. Select
Wizards |
Setup Wizard
and choose Telemetry: AEMNet from the Wizard Types column. Left click on the Configuration
Name AEMNet Datastream and click the Apply button to enable.
Infinity to Dash
The AEMNet CAN message transmission is enabled by default on Infinity ECUs. No additional software setup in
your ECU calibration is required. Refer to your harness documentation or Infinity hardware specification document to
identify the CAN terminals.