





















1
P94DVN01A
Cyclic Data Access
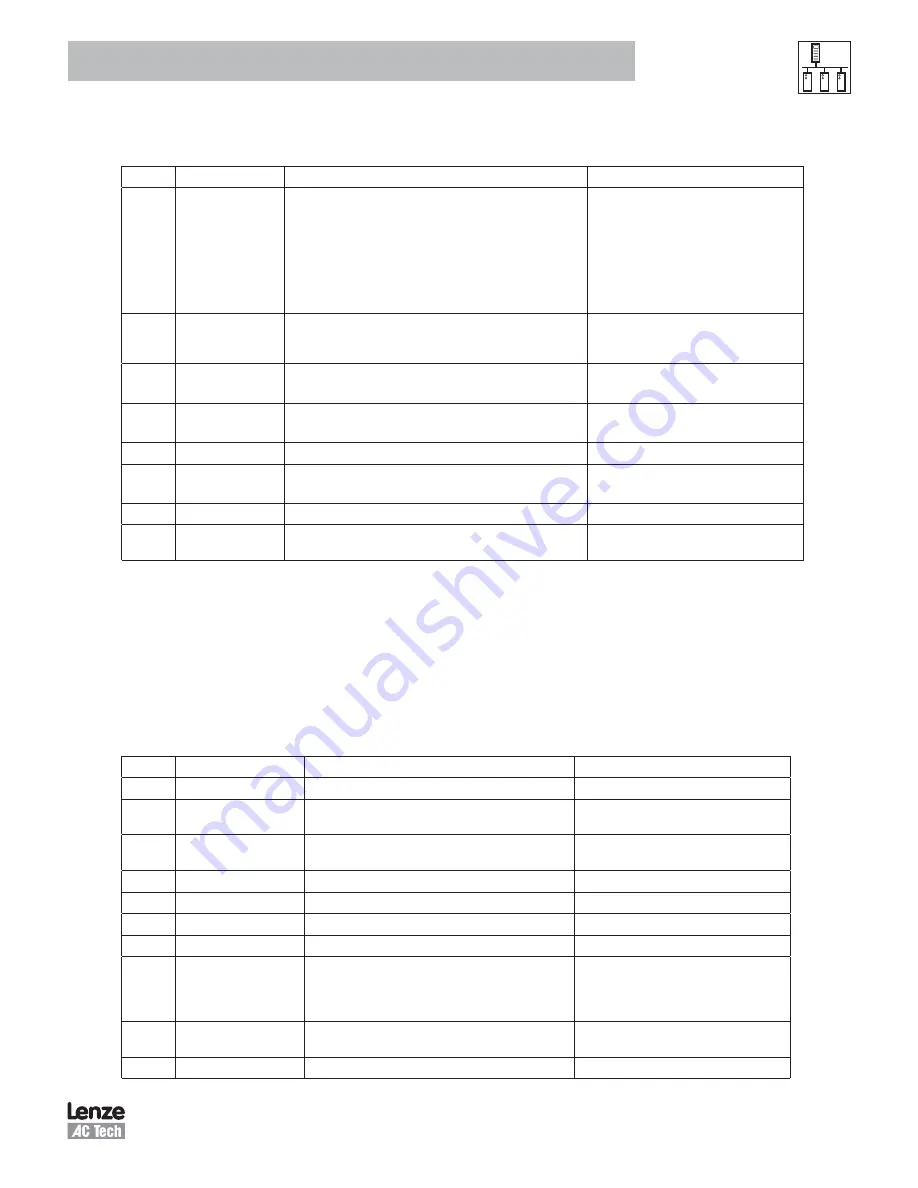
5.1.1 Byte 0 – Control Word
Table 8: Ouput Assembly - Control Word
Bit
Name
Description
Note
7
Enable
0 – disable drive
1 – enable drive
This bit controls PID 52
The Enable bit takes precedence over the
rest of the command bits and the command
type. If the drive is disabled (Enable bit =
0) no motion command can be executed
and the move command will be ignored.
The response assembly will be issued as
requested.
6
Reg Arm
The change from 0 to 1 arms the registration input C1
It is equivalent to the REGISTRATION ON
language statement. (Internally this is the
RegistrationOn function).
5
Hard Stop
1 – The drive stops the motion quickly
using the QDECEL and QACCEL values.
This bit controls PID 136 and sets it to 2
4
Smooth Stop
1 – The drive stops motion
using the normal DECEL and ACCEL values.
This bit controls PID 136 and sets it to 1
3
NA
0 – default setting (bit not used)
2
Relative
1 – Relative motion will be executed.
0 – Absolute motion will be executed
1
NA (0)
0 – default setting (bit not used)
0
Start Motion
Change from 0 to 1 starts a motion command equivalent to the
MOVED or MOVEP language commands
This bit in combination with the Relative bit
controls PID’s 92 and 93.
5.1.2 Byte 2 - Command Type
Command Axis (bits 7 to 5)
The values of these bits should always be 001 since the PositionServo has only 1 axis per drive.
Command Assembly Type
The Command Assembly Type ranges from 0x0 to 0x9 as listed in Table 9.
Table 9: Command Assembly Type
Type
Command
Description
Note
0x0
NOP
0x1
Start Trapezoidal Move
Initiates trapezoidal motion
Should be used together with the Start Motion
and Relative control bits
0x2
Set Target Reference
Sets the target reference PID 139 (IREF)
Target reference in RPS for velocity mode and
in phase Amps (RMS) for current mode.
0x3
Set Acceleration
Sets the acceleration PID 181 (ACCEL)
0x4
Set Deceleration
Sets the deceleration PID 182 (DECEL)
0x5
Set Maximum Velocity
Sets the maximum profile velocity PID 180 (MAXVEL)
0x6
Set Quick Deceleration
Sets the quick deceleration PID 183 (QDECEL)
0x7
Set Velocity Profile
Sets the velocity for profiled velocity mode PID 185 (VEL)
Profiled velocity is the special operation of
Position mode. To set profiled velocity mode
set PID 138 to 1. To return back to normal
positioning mode set PID 138 to 0.
0x8
Start S-curved Move
Initiates S-curve motion
Should be used together with the Start Motion
and Relative control bits
0x9
Set User Variable V0
Sets PID 100 (V0)





















































