





























4 Repair
4.6.1. Replacement of motor, axis 1
133
3HAC023297-001 Revision: A
Refitting
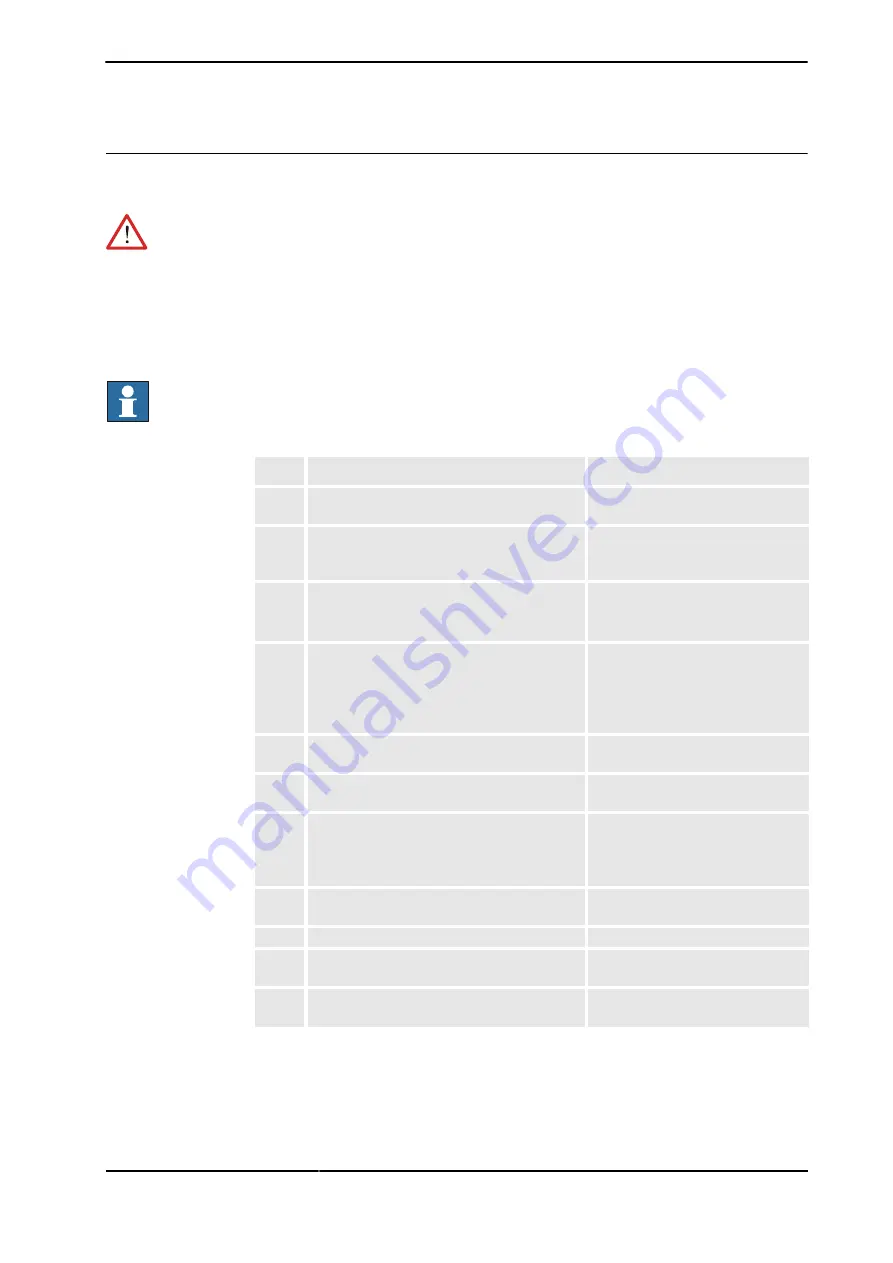
The procedure below details how to refit motor, axis 1.
WARNING!
Please observe the following before commencing any repair work on the manipulator:
•
- Motors and gears are HOT after running the robot! Burns may result from touching
the motors or gears!
•
- Turn off all electric power, hydraulic and pneumatic pressure supplies to the robot!
•
- Take any necessary measures to ensure that the manipulator does not collapse as
parts are removed, e.g. to secure the lower arm with fixtures if removing motor, axis 2.
NOTE!
Whenever parting/mating motor and gearbox, the gears may be damaged if excessive force is
used!
Step
Action
Note
1.
Make sure the mating surfaces on the motor
and the gearbox are clean and free from burrs.
2.
Make sure the o-ring on the circumference of
the motor is seated properly. Lightly lubricate
the o-ring with grease .
Art. no. is specified in section
3.
In order to release the brake, connect the 24
VDC power supply:
Connect to connector R2.MP1
•
+: pin 7
•
-: pin 8
4.
Fit the motor, making sure the motor pinion is
properly mated to gearbox 1.
Make sure the motor is turned the
right way, i.e. connections
rearwards.
Make sure the motor pinion does not
get damaged!
5.
Fit the motor with four attachment screws and
plain washers.
Tightening torque: approx 2 Nm
6.
Fit the Arm to the end of the motor shaft.
Art. no. is specified in section
7.
Adjust the motor in relation to the gear in the
gearbox.
Use the Arm tool to wiggle the motor shaft
back and forth to feel the play.
There should be a barely noticable
gear play.
8.
Tighten the motor attachment screws.
Tightening torque: approx 11 Nm ± 1
Nm
9.
Disconnect the brake release voltage.
10. Make sure the cable gland gasket has not
been damaged. Replace, if it has.
Art. no. is specified in section
11. Push the cables into the console, and refit the
cable gland with its attachment screws.
Summary of Contents for M2000
Page 1: ... Product manual part 1 of 2 procedures Articulated robot IRB 140 M2000 M2000A M2004 ...
Page 2: ......
Page 8: ...Table of Contents 3HAC023297 001 Revision A 6 ...
Page 42: ...1 Safety 1 3 4 WARNING Safety risks during work with gearbox oil 3HAC023297 001 Revision A 40 ...
Page 78: ...3 Maintenance 3 5 1 Oil change gearbox axes 5 and 6 3HAC023297 001 Revision A 76 ...
Page 176: ...5 Calibration information 5 6 Checking the calibration position 3HAC023297 001 Revision A 174 ...
Page 178: ......
Page 179: ......
Page 182: ......
Page 186: ...Table of Contents 3HAC023297 001 Revision A 4 ...
Page 192: ...Product documentation M2004 3HAC023297 001 Revision A 10 ...
Page 208: ...1 Reference information 1 11 Mounting instructions for seals 3HAC023297 001 Revision A 26 ...
Page 214: ...2 Spare part part list 2 2 Spare part part list 3HAC023297 001 Revision A 32 ...
Page 221: ......
Page 223: ...Circuit Diagram CONTENTS Page IRB 140 Manipulator diagram 3HAC 6816 3 Rev 0 101 108 ...
Page 224: ...Manipulator Circuit Diagram 3HAC 6816 3 IRB 140 No of Sheets 8 Sheet no 101 LIST OF CONTENTS ...
Page 227: ...Manipulator Circuit Diagram 3HAC 6816 3 IRB 140 No of Sheets 8 Sheet no 104 MOTOR AXIS 1 3 ...
Page 228: ...Manipulator Circuit Diagram 3HAC 6816 3 IRB 140 No of Sheets 8 Sheet no 105 FEEDBACK AXIS 1 3 ...
Page 229: ...Manipulator Circuit Diagram 3HAC 6816 3 IRB 140 No of Sheets 8 Sheet no 106 MOTOR AXIS 4 6 ...
Page 232: ......
Page 233: ......





































































