





























Preparations before removing the cable harness
Note
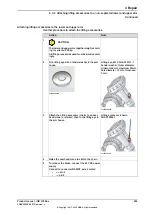
Action
xx1600002054
Jog the robot to the specified position:
•
Axis 1: 0°
•
Axis 2: -35°
•
Axis 3: +35°
•
Axis 4: 0°
•
Axis 5: +90°
•
Axis 6: No significance.
Note
The specified position is a recommended
position for an inverted robot. If the robot
has been taken down to floor standing, the
robot arm positions given are inaccurate
for replacement of the cable harness.
Axis-5 must be oriented as close as pos-
sible to +90° to be able to open the axis-6
motor cover and to remove the axis-6 motor
cables, and in order to avoid the spiral of
the cable harness in the carrier, being un-
wound or placed in the wrong position.
Depending on what tool is used, the other
axes may need to be jogged to another
position.
1
xx1700000348
Remove the transportation lock screw and
the yellow sleeve from the parking position.
2
Continues on next page
212
Product manual - IRB 6700Inv
3HAC058254-001 Revision: L
© Copyright 2017 - 2020 ABB. All rights reserved.
4 Repair
4.4.1 Removing the cable harness
Continued
Summary of Contents for IRB 6700Inv
Page 1: ...ROBOTICS Product manual IRB 6700Inv ...
Page 16: ...This page is intentionally left blank ...
Page 40: ...This page is intentionally left blank ...
Page 182: ...This page is intentionally left blank ...
Page 672: ...This page is intentionally left blank ...
Page 704: ...This page is intentionally left blank ...
Page 720: ...This page is intentionally left blank ...
Page 722: ...This page is intentionally left blank ...
Page 729: ......





















































