










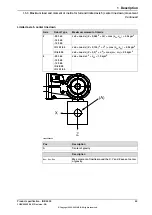


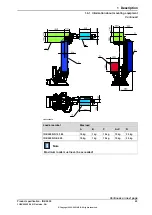







1.5.4 Wrist torque
Maximum torque due to payload
The table below shows the maximum permissible torque due to payload:
Note
The wrist torque values are for reference only, and should not be used for
calculating permitted load offset (position of center of gravity) within the load
diagram, since those also are limited by main axes torques as well as dynamic
loads. Furthermore, arm loads will influence the permitted load diagram. To find
the absolute limits of the load diagram, use the RobotStudio add-in RobotLoad.
Max torque valid at
load
Max wrist torque
axis 6
Max wrist torque
axis 4 and 5
Robot type
20 kg
16.7 Nm
36.3 Nm
IRB 2600-20/1.65
12 kg
10.0 Nm
21.8 Nm
IRB 2600-12/1.65
IRB 2600-12/1.85
15 kg
11 Nm
34.6 Nm
IRB 2600ID-15/1.85
8 kg
10.2 Nm
31.4 Nm
IRB 2600ID-8/2.00
50
Product specification - IRB 2600
3HAC035959-001 Revision: AA
© Copyright 2009-2021 ABB. All rights reserved.
1 Description
1.5.4 Wrist torque
Summary of Contents for IRB 2600
Page 1: ...ROBOTICS Product specification IRB 2600 ...
Page 6: ...This page is intentionally left blank ...
Page 10: ...This page is intentionally left blank ...
Page 92: ...This page is intentionally left blank ...
Page 94: ...This page is intentionally left blank ...
Page 96: ......
Page 97: ......





















































