17
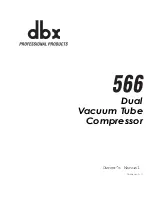
10.4 Safe shutoff for products with IO-Link
INFORMATION
For safe shutoff for IO-Link products, two contactors are switched in series with one auxiliary contact each. Here,
the auxiliary contacts monitor the status of the contactors. If one contactor does not switch, the second contactor
ensures safety. The malfunction can still be detected using the contacts.
The following figure shows the example of a circuit through which the IO-Link master cannot conduct the load current of the
product.
.
PE
.
.
1
.
.
2
.
.
3
.
.
4
.
+24V_UA
GND_UA
+24V_US
GND_US
GND V1
V1 (+)
GND V2
V2 (+)
br
W1
M12 5pol 5m
ws
bl
sw
gr
1
2
3
4
5
1
Bosch_Timo_Plan.0007_images\image0.jpg
Bosch_Timo_Plan.0007_images\image1.jpg
Bosch_Timo_Plan.0007_images\image2.jpg
1
2
3
4
3
4
Q1
1
2
3
4
5
6
1
2
3
4
5
6
Q2
1
2
3
4
5
6
1
2
3
4
5
6
Rk_1
Rk_2
Bosch_Timo_Plan.0007_images\image3.jpg
X01
V1 (+)
1
V2 (+)
2
GND V1
3
GND V2
4
V1 (+)
1
V2 (+)
2
GND V1
3
GND V2
4
V2 +
1
DXP
2
GND V2
3
C/Q
4
n.c.
5
BR
WS
BL
SW
Power
IN
21
22
21
22
21
22
21
22
K1
S24V
1
P24V
2
SGND
3
C/Q
4
PGND
5
Up
GND Up
Us
GND Us
PE
Up
GND Up
Us
GND Us
PE
F1
2
1
F2
2
1
S1
S2
1
3
4
1
2
3
4
5
1
3
4
1
1
1
2
3
3
3
4
4
4
5
1
.
2
.
3
.
IO-Link master with port class A
Feedback circuit
Q1 & Q2
IO-Link gripper
Y-cable
Power supply for IO-Link
Au
xiliar
y
cont
act
Q1 & Q2
Fieldbus
IN
Fieldbus
OUT
Fieldbus
IN
Fieldbus
OUT
Voltage OUT
Voltage IN
NOTICE
Without an externally fed voltage supply, the motor of the product cannot carry out an active movement and thus
cannot carry out a hazardous movement.
There is no galvanic separation between the two voltage supplies (signal and power). There is a low-voltage
connection via the ground (GND).
Because of the self-locking mechanism, the product remains in the last approached position, even if no voltage is
supplied.
INSTALLATION AND OPERATING INSTRUCTIONS:
HRC-03
DDOC00268 / h
EN / 2022-12-19
Zimmer GmbH • Im Salmenkopf 5 •
77866 Rheinau, Germany •
+49 7844 9138 0 • www.zimmer-group.com