24
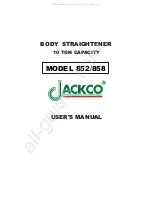
10.5.11 HRC-03-148656 pin assignment
pin Color
Function
Explanation
4
3
2
1
8
7
6
5
0430200801 8-pin Socket
1
White
Input 1
Outward move command
2
Brown
Input 2
Inward move command
3
-
-
-
4
-
-
-
5
Gray
Output 5
Outside signal
6
Pink
Output 6
Inside signal
7
Blue
+ 24 V DC
+ 24 V DC supply voltage
8
Red
GND
0 V DC supply voltage
The inputs of the product are configured for PNP outputs of the control system.
►
Connect the product to the voltage supply.
►
Ensure the proper voltage supply.
•
A voltage supply between Pin 7 and Pin 8 is necessary for operation.
Ö
A jaw movement is triggered by a 24 V signal to Pin 1 or Pin 2.
Movement
Pin 1
Pin 2
Product in rest mode
0
0
Open the product
1
0
Close the product
0
1
Zimmer GmbH • Im Salmenkopf 5 •
77866 Rheinau, Germany •
+49 7844 9138 0 • www.zimmer-group.com
INSTALLATION AND OPERATING INSTRUCTIONS:
HRC-03
DDOC00268 / h
EN / 2022-12-19