
























13
ZABER TECHNOLOGIES INC.
Getting Started Guide
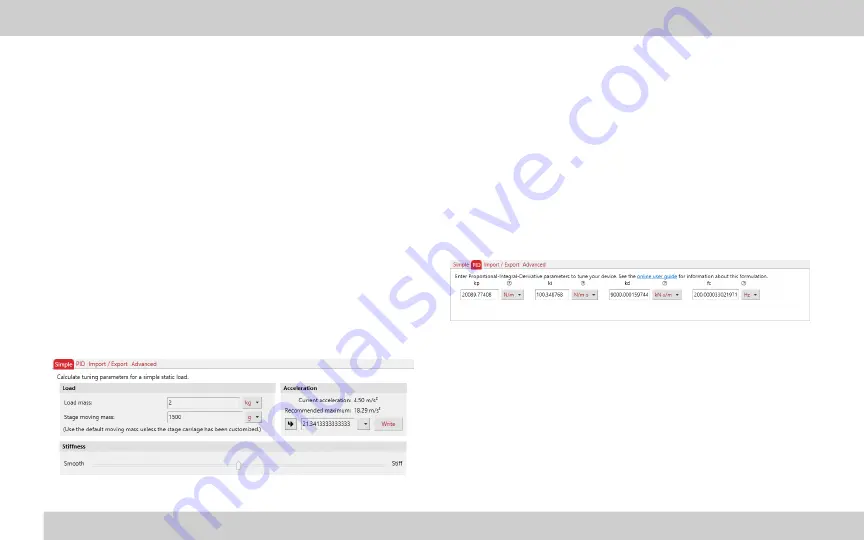
As the mass is changed, the largest reasonable acceleration of
the axis also changes. While this is not one of the servo tuning
parameters, setting the acceleration too high can also create
overshoot or instability in the system. The Simple tuning control also
indicates the maximum recommended acceleration you should set
based on the load and allows you to adjust it within the tool.
PID
If you have experience tuning a proportional-integral-derivative
(PID) controller, this tuning method will allow you to adjust the
parameters using familiar gain and filter cutoff frequency values.
Import/Export
Use Import/Export to save sets of parameters to a file on your
computer. These parameter sets can be named and will be
displayed as long as that file is selected. Use this tool to move
parameter sets from computer to computer, or to easily apply
parameter sets to multiple devices.
Tuning Methods
The servo tuning tool includes 4 modes for tuning:
Simple
The inertia of the moving load is the minimum information about
an application required to choose reasonable tuning parameters.
For linear motion this is the moving mass; for rotary motion it is
the mass moment of inertia. The simple mode allows you to set
parameters using only this information.
The inertia has two components: the inertia of the carriage of the
device and the inertia of the load added to the stage. Using the
Simple tuning method in Zaber Console, the carriage inertia is
automatically set, and the user can enter the contribution from
their load.
A slider allows optional adjustment between smoother (less
position overshoot) and stiffer (faster and more forceful response
to position errors) motion.







































































