





























IM 12D08N05-01E
5-8
<5. MENU STRUCTURE COMMISSIONING>
l
Integral control
Integral control is used to eliminate the steady state error and any future process changes.
It will accumulate setpoint and process (load) changes by continuing to adjust the output
until the error is eliminated. Small values of integral term (I-time in seconds) provide quick
compensation, but increase overshoot. Usually, the integral term is set to a maximum
value that provides a compromise between the three system characteristics of: overshoot,
settling time, and the time necessary to cancel the effects of static loading (process
changes). The integral term is provided with an anti windup function. When the output of PI
portion of the controller is outside the control range (less than -5% or greater than 105%),
the I-part is frozen.
l
Derivative control
The control acts on the slope (rate of change) of the process value, thereby minimizing
overshoot. It provides “rate” feedback, resulting in more damping. High derivative gains
can increase the rising time and settling time. It is difficult to realize in practice because
differentiation leads to “noisy” signals.
SP
PV
e
+-
++
++
+-
e
Range
∫e dt
1
T
i
T
d
dPV
dt
z
Process
Controller
Actuator
Process
Figure 5.1 Control Diagram
l
Expire time
If the output is over 100% for longer than the expire time, the output will return to 0%.
l
Damping time
The response to a step input change reaches approximately 90 percent of its final value
within the damping time.
100%
0%
set
point
process
value
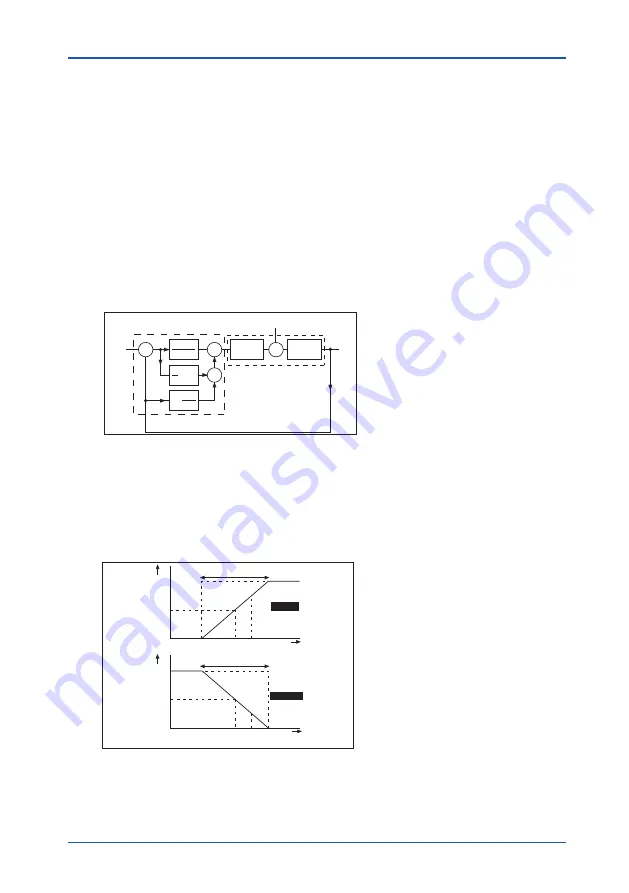
Direct
100%
0%
set
point
process
value
Reverse
range
range
manual
reset
manual
reset
Figure 5.2 Direct/Reverse action
Содержание SC450G
Страница 1: ...User s Manual IM 12D08N05 01E 5th Edition Model SC450G Conductivity Converter Style S2 ...
Страница 12: ...Blank Page ...
Страница 58: ...Blank Page ...
Страница 62: ...Blank Page ...
Страница 79: ...IM 12D08N05 01E APP 13 APPENDIXES Appendix 7 Control drawing for FM approval ...
Страница 80: ...Blank Page ...