



























Maintenance and inspection
9
-
74
3. Press the „page key“
or select {PAGE} to display the selection window for the
control group.
Occuring 2 or more group axes, select those one to you intend to specify second home
position.
4. Press the axis keys.
- Move the Robot to the new second home position.
5. Press {MODIFY} then {ENTER}.
- The second home position is changed.
9.5.3
Procedure after alarm
Follow the safety instructions described in section 1.7 "Safety" on page 8 .
WARNING!
Death or injury because of danger of crushing
Irregularities in the PG system may lead to an alarm and the robot may perform unexpected
movements.
If the "OUT OF RANGE (ABSO DATA)" alarm occurs,
•
Reset the alarm.
•
the SERVO power ON.
Then confirm the second home position. After the confirmation, if the PG system is found
to be the cause of the alarm, perform the necessary operation, such as replacing the PG
system, etc.
The robot current position data when turning main power supply ON and OFF can be
confirmed in {POWER ON/OFF POS} window.
1. Select {ROBOT} from the main menu.
The sub-menu choices appear.
Содержание MPL300-J00
Страница 1: ...ROBOTICS MPL300 J00 YR MPL0300 J00 Operating and Maintenance Manual ...
Страница 61: ...Maintenance and inspection 9 61 Air outlet cap Joint 80 9 0 170 1 1 2 2 2 1 2 ...
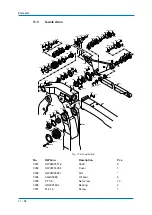
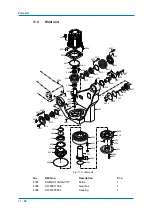
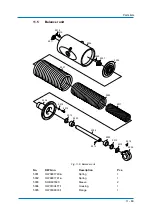
Страница 91: ...Parts lists 11 91 ...
Страница 92: ...YASKAWA Headquarter ...