





























6-
6
6
PROGRAMMING
6-2 Editing Programs
6-2-2 Creating a new program
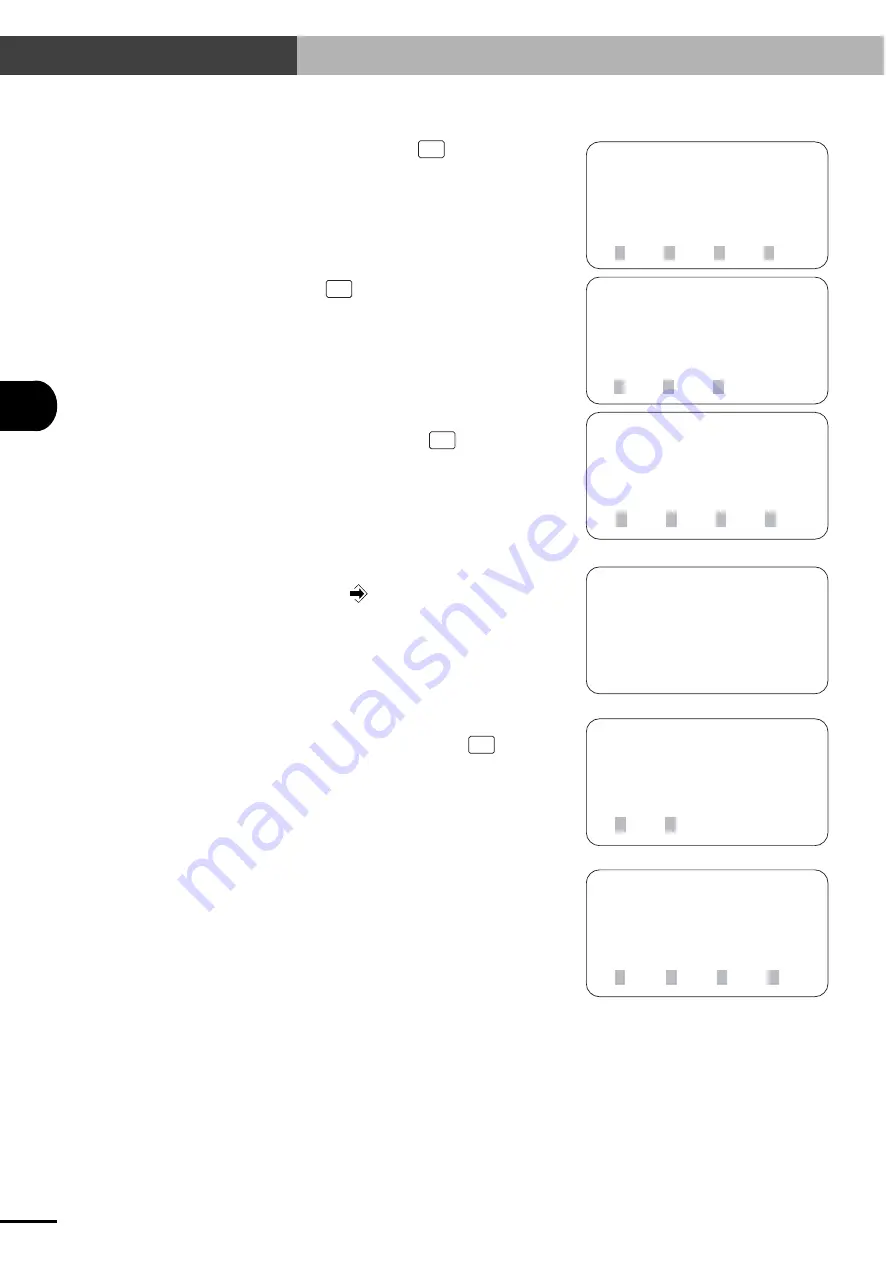
1) On the initial screen, press
F1
(EDIT).
[MENU]
select menu
1EDIT2OPRT3SYS 4MON
[EDIT]
select menu
1PGM 2PNT 3UTL
[EDIT-PGM]
No10
017:MOVA 254,100
1MOD 2INS 3DEL 4CHG
[EDIT-PGM]
PGM No = _
(Program No) 0
→
99
[EDIT-PGM]
PGM No = 14
New entry OK ?
1yes 2no
[EDIT-PGM]
No14
001:_
1MOVA 2MOVI3MOVF
4next
2) Next, press
F1
(PGM).
3) The execution program number and step are
displayed on the screen. Press
F4
(CHG) here.
4) Enter the new program number with the number
keys and press
.
5) A confirmation message appears. Make sure the
program number is correct and press
F1
(yes).
6) Proceed with program editing by following step
6 onward in "6-2-1 Creating programs after ini-
tialization."
Содержание ERCX Series
Страница 2: ......
Страница 8: ...vi MEMO ...
Страница 60: ...3 36 MEMO ...
Страница 90: ...5 20 MEMO ...
Страница 168: ...9 16 MEMO ...
Страница 232: ...12 10 MEMO ...
Страница 248: ...14 4 MEMO ...
Страница 249: ...15 1 15 SPECIFICATIONS Chapter 15 SPECIFICATIONS ...
Страница 253: ...16 1 16 APPENDIX Chapter 16 APPENDIX ...
Страница 259: ...MEMO ...