





























UI Robot Technology Co. Ltd.
M4120170509EN
Page 29
UIM241 Miniature Integrated Stepper Motor Controller(
Closed-loop
)
1.
AA denotes a basic ACK message, is a kind of reply to instructions received.
2.
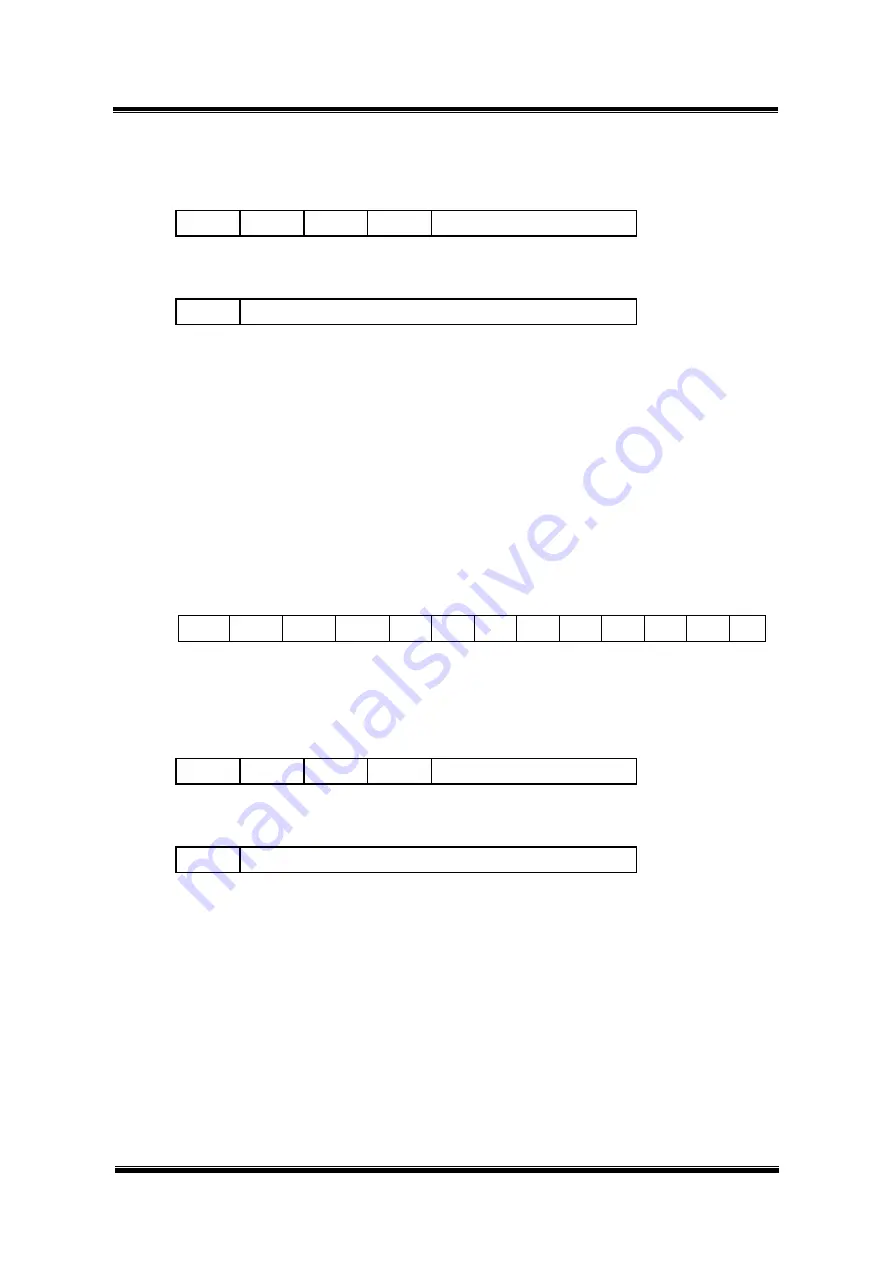
ASM (Assembled byte) structure:
Bit
7
6
5
4
3
2
1
0
value
N/A(=0)
ACR
ENA / OFF
DIR
MCS – 1
(
0=full step
,
15=1/16 step)
3.
CUR (desired phase current) structure:
Bit
7
6
5
4
3
2
1
0
value
N/A(=0)
Phase Current (e.g. 27 = 2.7 Amp)
4.
SPD2 – SPD0 denotes the desired motor speed. See Figure 10-1 for how to convert
to a signed 16bit integer.
5.
STP4 – STP0 denotes the desired motor displacement. See Figure 10-2 for how to
convert to a signed 32bit integer.
6.3 Motor Status Feedback Message
Upon receiving the FBK instruction, the controller will send back the feedback message
comprising the following up-to-date motor status: incremental displacement, speed,
direction, micro-stepping resolution, and phase current, enabled/offline status and ACR
status.
The feedback Message is 13 bytes long in the following format:
Byte
1
2
3
4
5
6
7
8
9
10
11
12
13
Value
CC
0
ASB
CUR SPD2 SPD1 SPD0 STP4 STP3 STP2 STP1 STP0 FF
Where,
1.
CC denotes a Motor Status Feedback Message. (i.e., the present value of motor status)
2.
[ASB] (assembled) byte structure:
Bit
7
6
5
4
3
2
1
0
value
N/A(=0)
ACR
ENA / OFF
DIR
MCS – 1
(
0=full step
,
15=1/16 step)
3.
[CUR] (current phase current) structure
Bit
7
6
5
4
3
2
1
0
value
N/A(=0)
Phase Current (e.g. 27 = 2.7 Amp)
4.
SPD2 – SPD0 denotes the current motor speed. See Figure 10-1 for how to convert
to a signed 16bit integer.
5.
STP4 – STP0 denotes the current motor displacement. See Figure 10-2 for how to
convert to a signed 32bit integer.
For more details on above conversion, please refer to the source code of the provided
demo software. These software and related source code are VC++/VB based and free.






































































