















19
false, 1 true)
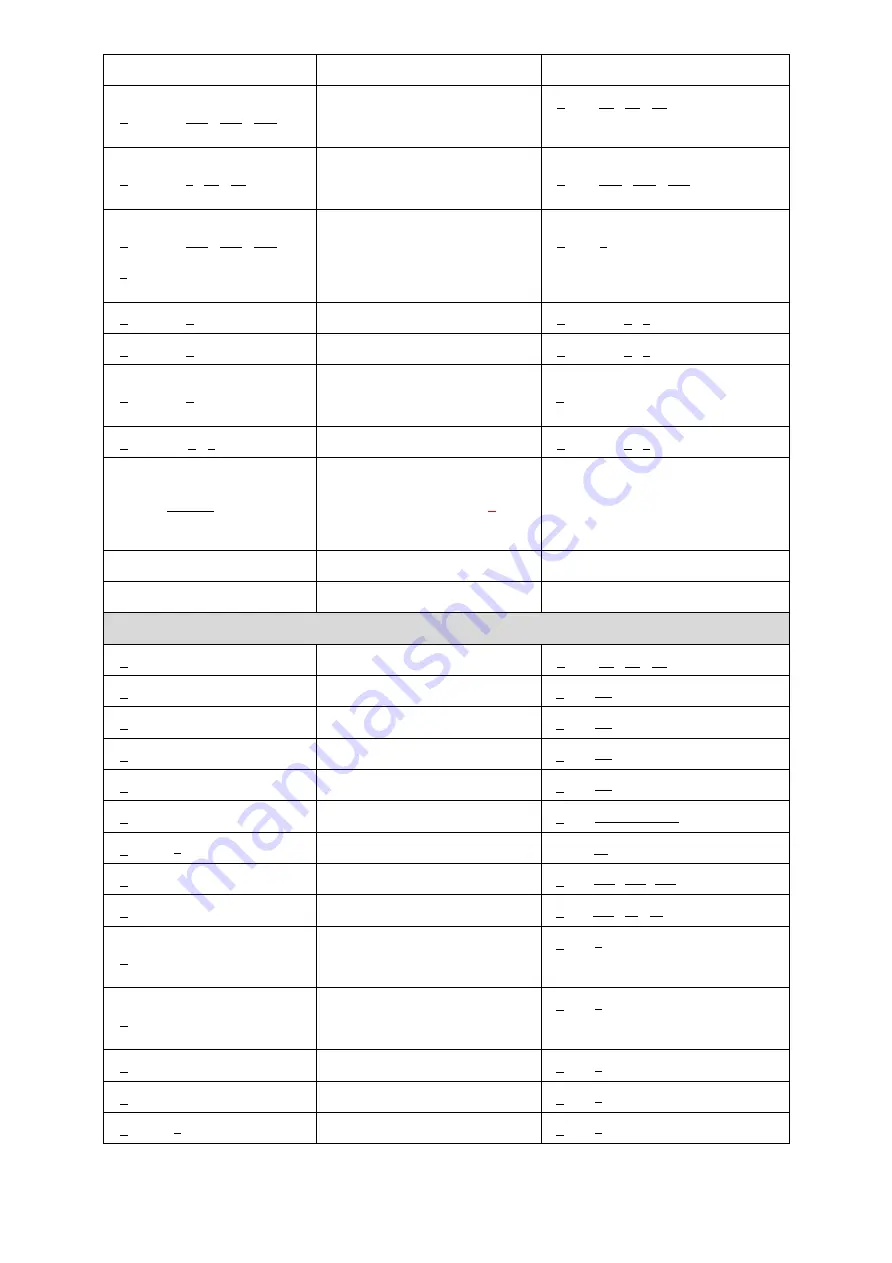
#
n
M2220 X
100
Y
100
Z
100
\n
Convert coordinates to angle of
joints
$
n
OK B
50
L
50
R
50
\n
(Bjoint 0,Ljoint
1,R joints 2, 0~180)
#
n
M2221 B
0
L
50
R
50
\n
Convert angle of joints to
coordinates
$
n
OK X
100
Y
100
Z
100
\n
#
n
M2222 X
100
Y
100
Z
100
P
0
\n
Check if it can
reach,P1polar,P0Cartesian
coordinates
$
n
OK V
1
\n
(1 reachable,0
unreachable)
#
n
M2231 V
1
\n
pump V1working, V0stop
$
n
OK \n
or
$
n
E
x
\n
(refer to Err output)
#
n
M2232 V
1
\n
gripper V1close, V0open
$
n
OK \n
or
$
n
E
x
\n
(refer to Err output)
#
n
M2234 V
1
\n
Enable/disable Bluetooth (1:enable,
0:disable)
$
n
OK\n
#
n
M2240 N
1
V
1
\n
Set the digital IO output
$
n
OK \n
or
$
n
E
x
\n
(refer to Err output)
M2245 V
btname
\n
Set the name of Bluetooth, 11
letters limited
(Do not add
#
n
in
this command)
OK \n
Querying Command
(parameters are in underline)
#
n
P2200\n
Get
the current angle of joints
$
n
OK B
50
L
50
R
50
\n
#
n
P2201\n
Get the device name
$
n
OK V
3.2
\n
#
n
P2202\n
Get the hardware version
$
n
OK V
1.2
\n
#
n
P2203\n
Get the software version
$
n
OK V
3.2
\n
#
n
P2204\n
Get the API version
$
n
OK V
3.2
\n
#
n
P2205\n
Get the UID
$
n
OK V
0123456789AB
\n
#
n
P2206 N
0
\n
Get the angle of number 0 joint (0~2)
$n OK V
80
\n
#
n
P2220\n
Get current coordinates
$
n
OK X
100
Y
100
Z
100
\n
#
n
P2221\n
Get current polar coordinates
$
n
OK S
100
R
90
H
80
\n
#
n
P2231\n
Get the status of pump
$
n
OK V
1
\n
(0 stop, 1 working, 2 grabbing
things)
#
n
P2232\n
Get the status of gripper
$
n
OK V
1
\n
(0 stop, 1 working, 2 grabbing
things)
#
n
P2233\n
Get the status of limited switch
$
n
OK V
1
(1 triggered, 0untriggered)
#
n
P2234\n
Get the status of power connection
$
n
OK V
1
(1 connected, 0 unconnected)
#
n
P2240 N
1
\n
Get the status of digital IO
$
n
OK V
1
\n
(1 High, 0 Low)
Содержание uArm Swift
Страница 1: ......
Страница 4: ...4 Product Overview 1 Reference Frame...
Страница 5: ...5 2 Buttons Indicator Lights 3 Extension Description...
Страница 7: ...7 Note Before unplugging the wire press the locker of connector and then unplug it...
Страница 8: ...8 2 Swift Gripper Step 1 Fix the gripper to the front mounting block...







































































