



















PD42-
x
-1370 Hardware Manual • Hardware Version V1.10 | Document Revision V1.10 • 2018-AUG-18
5 / 27
3 Mechanical and Electrical Interfacing
All PD42-
x
-1370 consist of one out of four available NEMA17 / 42mm stepper motors with 2A RMS rated
coil current with the same controller / driver electronics mounted on its backside and integrated magnetic
encoder. The PD42-1-1370 uses the QSH4218-34-20-022 stepper motor with 0.22Nm holding torque, the
PD42-2-1370 uses the QSH4218-38-20-036 stepper motor with 0.36Nm holding torque, the PD42-3-1370
uses the QSH4218-47-20-044 stepper motor with 0.44Nm holding torque and the PD42-4-1370 uses the
QSH4218-60-20-070 stepper motor with 0.7Nm holding torque.
NOTICE
Note:
In order to make proper use of the integrated magnetic encoder (the
sensor IC is placed on the bottom of the pcb) the controller /driver electronics
should not be removed/moved relative to the motor. In case the integrated
encoder feature is not used, the electronics may be moved or even removed from
the motor and placed somewhere else according to application requirements.
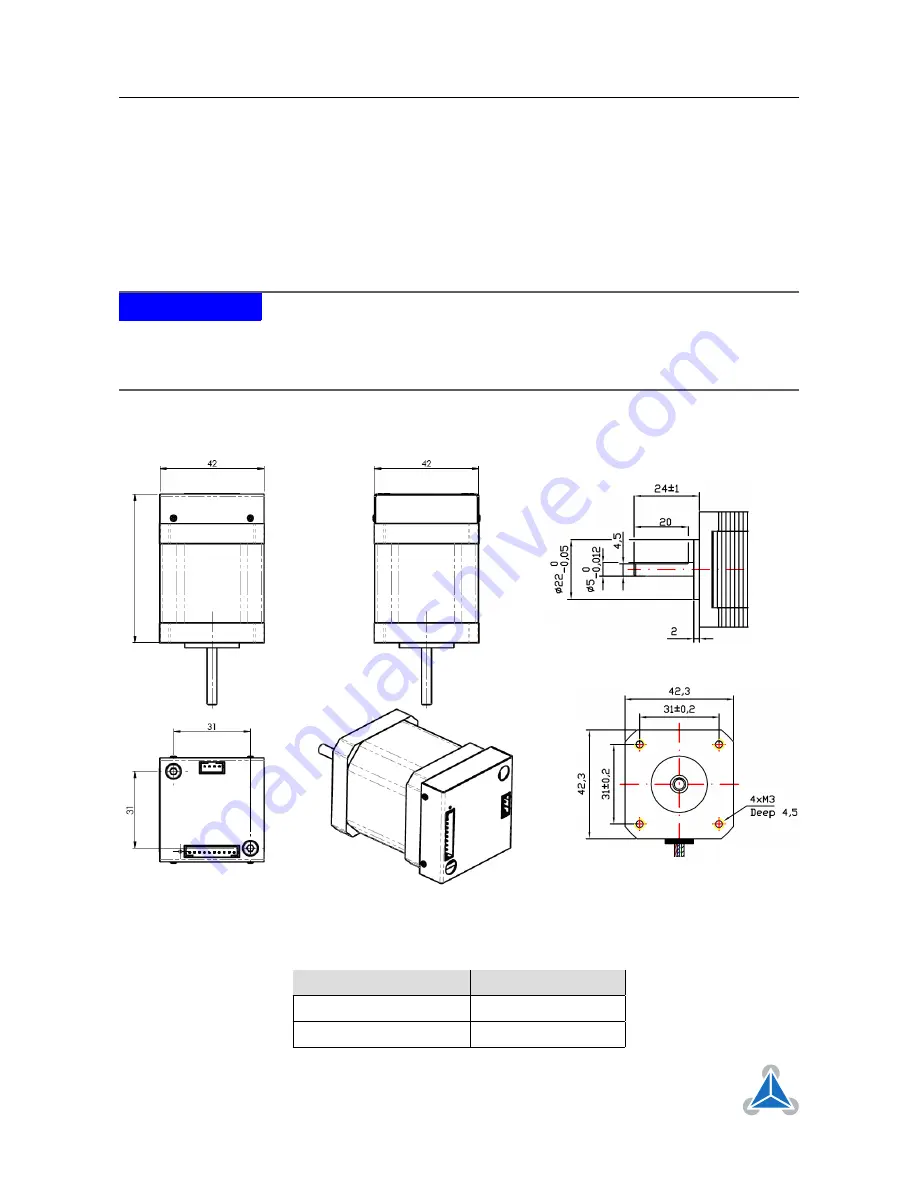
3.1 Dimensions of PD42-
x
-1370
Leng
th
Figure 1: PD42-x-1370 with different NEMA17 / 42mm stepper motors (all dimensions in mm)
PANdrive
Overall length of unit
PD42-1-1370
46.5
±
1 mm
PD42-2-1370
51
±
1 mm
©2018 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at
www.trinamic.com