





















PD42-
x
-1370 Hardware Manual • Hardware Version V1.10 | Document Revision V1.10 • 2018-AUG-18
20 / 27
10 Functional Description
The PD42-
x
-1370 is a full mechatronic solution including a 42mm flange (NEMA17) bipolar stepper motor.
It includes the controller / driver electronics and a choice between four different NEMA 17 / 42mm flange
size bipolar hybrid stepper motors with different length and torque.
The PD42-
x
-1370 offers an advanced s-shaped ramp motion controller in hardware. Together with the
integrated high resolution magnetic encoder position regulation is supported in hardware (configurable in
software). The unit can be controlled via RS485 2-wire serial interfaces. There are four general purpose
digital inputs which can be used as STOP_L / STOP_R / HOME switch inputs, also (for reference movements,
as end switches etc. depending on firmware, mode and configuration) and a dedicated driver enable input.
In addition, there is one general-purpose output (open-drain).
The PD42-
x
-1370 with TMCL™ firmware option is supported by the PC based software development
environment TMCL-IDE for the Trinamic Motion Control Language (TMCL™). Using predefined TMCL™
high level commands like move to position a rapid and fast development of motion control applications
is guaranteed. Please refer to the PD42-
x
-1370 firmware manual for more information about TMCL™
commands.
Communication traffic is kept low since all time critical operations, e.g. ramp calculation, position regu-
lation are performed on board. Complete stand-alone or full remote control or anything in-between is
possible. The firmware of the module can be updated via the serial interface. As an alternative to TMCL, a
CANopen firmware is available.
The PD42-
x
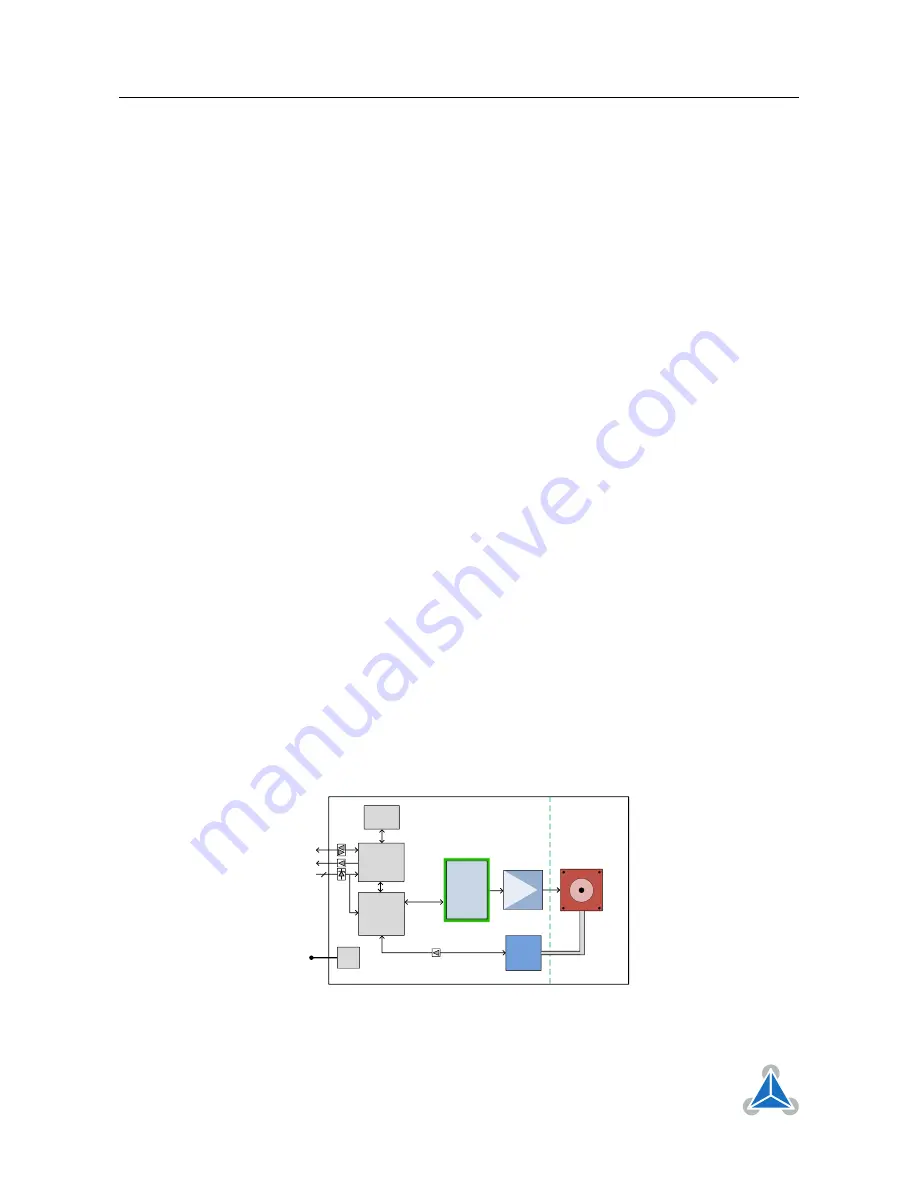
-1370 contains the following main components:
• NEMA 17 / 42mm flange size stepper motor with 2A RMS coil windings, different length and holding
torque (0.22Nm . . . 0.7Nm)
• Microcontroller (ARM Cortex-M4™), responsible for overall control and communication
• Advanced s-shape ramps hardware motion controller
• Advanced stepper motor driver with stallGuard2™ and coolStep™ with MOSFET driver stage
• High-resolution magnetic / hall sensor based encoder
• RS485 transceiver
• On-board voltage regulators (+5V and +3V3) required for supply of all on-board digital circuits
9… 28V DC
ARM
Cortex-M3
TM
microcontroller
TMCL™
Memory
4
IN_0..IN_3
Step
Motor
RS485
MOSFET
Driver
Stage
Energy Efficient
Driver
TMC262
TMC262
Pre-Driver
with
stallGuard2
TM
coolStep™
SPI
PD42-1-1370
PD42-2-1370
PD42-3-1370
PD42-4-1370
TMCM-1370
SPI
TMC4361
Motion
Controller
SPI
DC/DC
Magnetic
Encoder
A/B/N
QSH4218-34-20-022
QSH4218-38-20-036
QSH4218-47-20-044
QSH4218-60-20-070
OUT_0
SPI
HOME,
REFL,
REFR
Figure 13: PD42-x-1370 block diagram
©2018 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at
www.trinamic.com