



























36
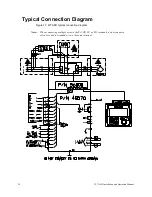
W7 ASD Installation and Operation Manual
S
YSTEM
I
NFORMATION
AND
S
ETUP
Setup
Switch-on-the-Fly
0961
Electronic Thermal Protection #1
0600
PID Setup
Input Feedback Selection
0360
Delay Filter
0361
Proportional Gain
0362
Integral Gain
0363
Upper Deviation Limit
0364
Lower Deviation Limit
0365
Differential Gain
0366
Upper Limit Frequency
0012
Lower Limit Frequency
0013
Acceleration Time #1
0009
Deceleration Time #1
0010
Low-output Disable Selection
0731
Low-output Disable Start Level
0732
Low-output Disable Delay Time
0733
Low-output Disable Boost Level
0734
Low-output Disable Boost Time
0735
Low-output Disable Feedback Level
0736
Low-output Disable Restart Delay
0737
4–20 mA Loss Selection
0962
4–20 mA Speed Reference
0964
Frequency Command Panel
N/A
PID Feedback Value
N/A
Trip History
(RTC option required)
Trip Number
N/A
Trip Type
Frequency at trip
Output current
Output voltage
Direction
Frequency reference
DC voltage
Run timer
Post-compensation frequency
Speed feedback (real)
Speed feedback (filtered)
Torque feedback
Torque reference
Torque current
Excitation current
Program Menu Navigation
Primary Menu
Sub Menu
Parameter Name
Parameter
Number