





























UM1036
Hardware setting of the STEVAL-IHM028V1
Doc ID 18293 Rev 1
27/48
4.3
Hardware settings for FOC in single-shunt configuration
To drive any motor, the user must ensure that:
●
The motor control demonstration board is driven by a control board which provides the
six output signals required to drive the 3-phase power stage
●
The motor is connected to the J4 motor output connector
●
If using an encoder or Hall sensor connection, it is connected to connector J5
●
If using a tachometer connection, it is connected to connector J6
●
If using the brake control feature, connect a dissipative power load to connector J7.
Table 5
shows the jumper settings for any motors. Please confirm that the demonstration
board input voltage is in the range of 125 VDC to 400 VDC or 90 VAC to 285 VAC.
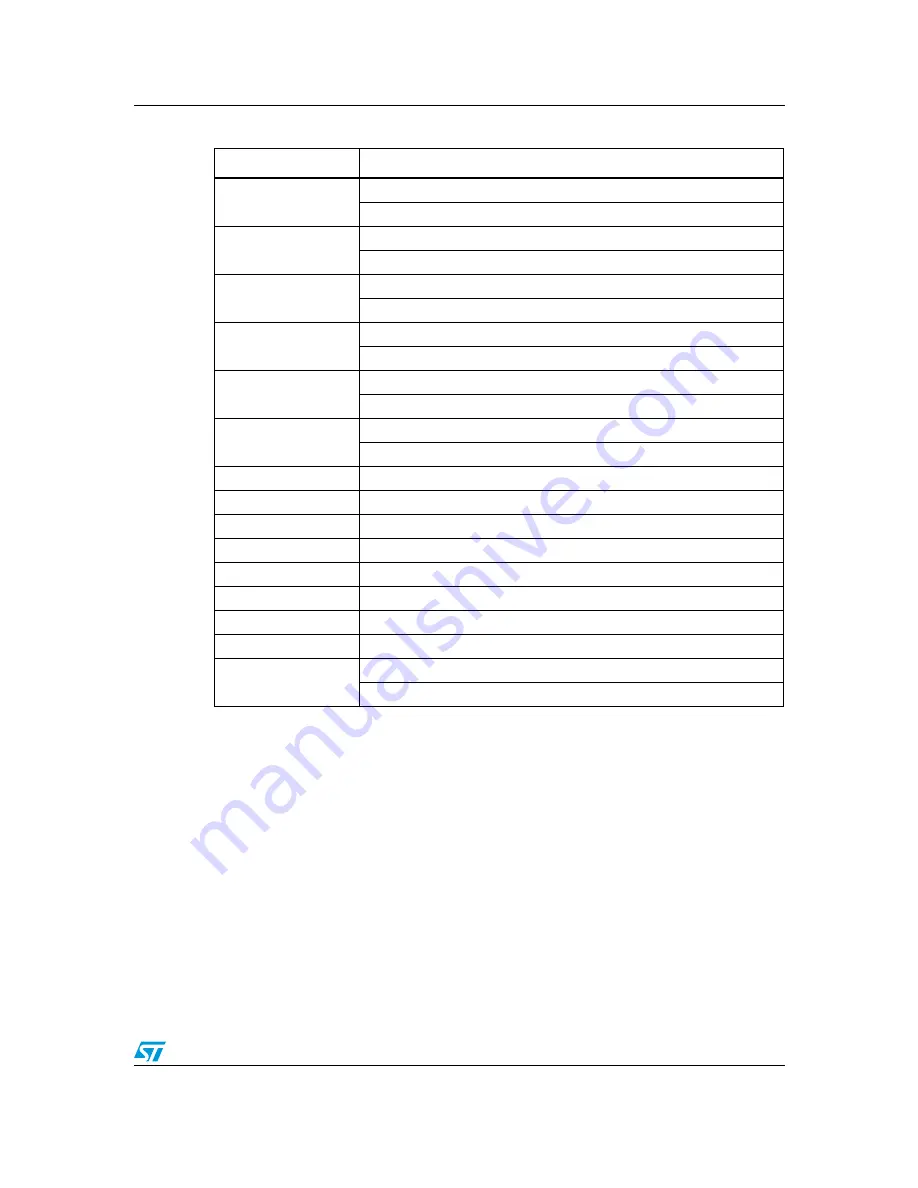
Table 4.
Jumper settings for PMSM or generic AC motor - FOC in three-shunt
Jumper
Settings for FOC in three-shunt
W1
A position for V
DD
= 3.3 V
B position for V
DD
= 5 V
W2
A position for software brake
B position for disabling OCP
W3
Not present
Present - supply J2 with V
DD
(max. 50 mA)
W4
Present for tachometer
Not present for tachometer / encoder
W5
Present for Hall / encoder
Not present for tachometer
W6
A position - V
DD
for Hall / encoder
B position - +5 V for Hall / encoder
W7
Not present
W8
Not present
W9
Present
W10
Present
W11
Present
W12
Present
W13
Present
W14
Present
W15
Present for voltage doubler (max. 145 VAC)
Not present for normal supply range







































































