






















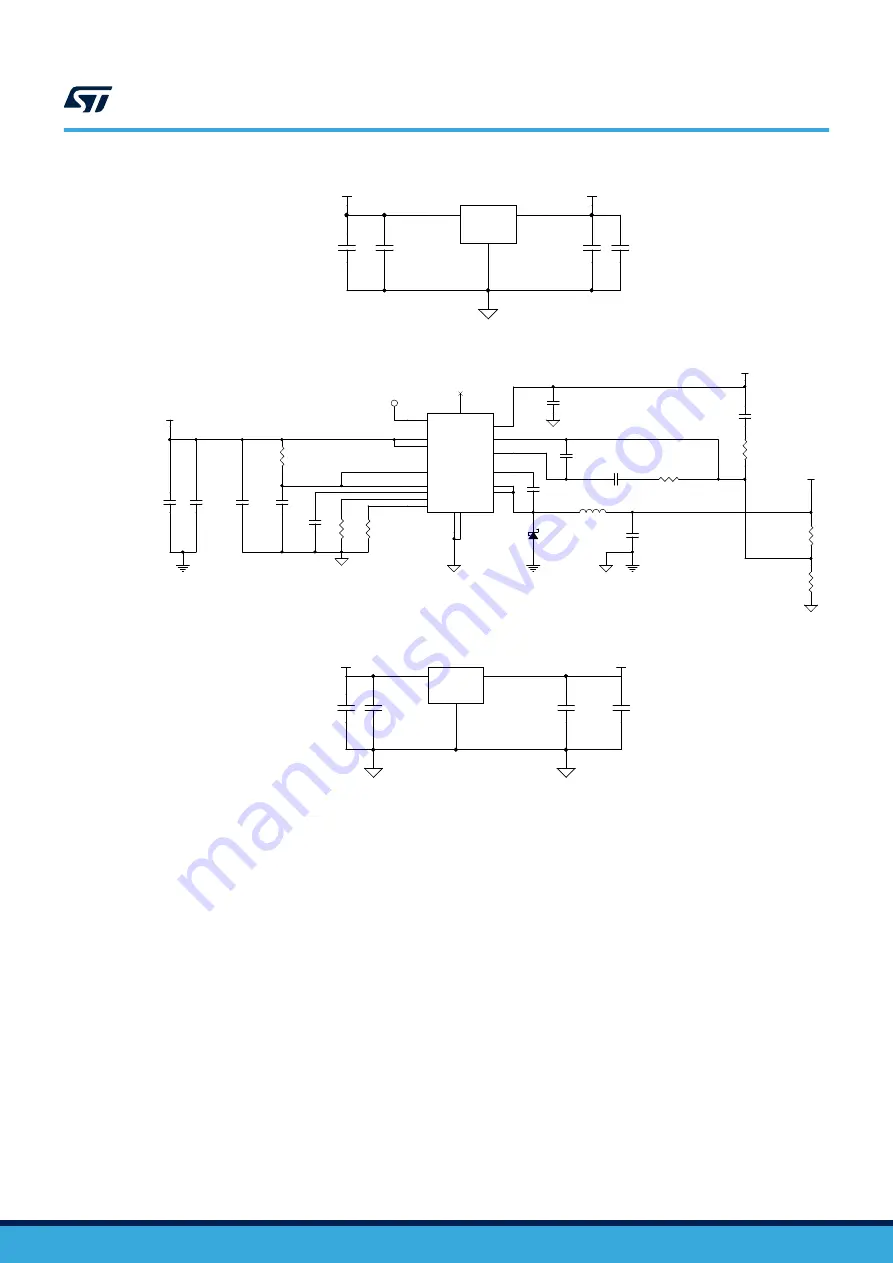
Figure 10.
3.8 and 3 V regulation
3v3
3v8
C172
10nF
N.M.
C168
2.2uF
U27 LD39150DT33-R
Vout
2
GND
4
Vin
1
C173
0.1uF
C156
1uF
Vin
4
Figure 11.
DC-DC regulation - V
BUS
to 15 V regulation
+15Vcc
+Vbus
+15Vcc
R136
0
C116
3.3uF
C120
10uF
TP2
5001
D18
STPS2L60A
C108
1uF
C117
3.3uF
R139
39k
C118
1 uF
R141
2.2k
C112
180pF
R140
39k
L6
1
2
L7987L
U15
VBIAS
1
VIN
2
VIN_2
3
VCC
4
EN
5
SS
6
SYNCH
7
COMP
8
FB
9
FSW
10
ILIM
11
PGOOD
12
LX
13
LX_2
14
BOOT
15
GND
16
EP
17
R138
46.4k
C109
820pF
C119
0.1uF
R135
750R
C115
0.1uF
C206
1 uF
17
15
14
13
12
9
8
1
U15
1
33uH
C114
27nF
R137
3.3k
R136
0
519.4 kHz
Figure 12.
15 V to 5 V regulation
+5V
+15Vcc
C210
0.1uF
C111
1uF
U16
IN
1
OUT
3
GND
4
L7805CD2T-TR
C110
0.1uF
C113
1uF
2.6
Ethernet real-time connectivity
The connectivity core is the NETX90 multi-protocol SoC which integrates two PHYs with 100 Mbps
communication speed, powered by a dual core structure and several peripherals, such as SPI,USART,I
2
C, CAN,
FMC, ADC and timers.
Communication peripherals (such as SPI and FMC) manage the communication between the controller and the
MCU (feature implemented by dedicated libraries that have been developed by the controller manufacturer).
Other peripherals, such as EnDat2.2 , BiSS and SSi, interface the controller with the encoder in motor control
applications (the related libraries are not implemented at the moment).
The network controller for this application solution is programmed with the EtherCAT protocol, enabling a
communication with low latency and low jitter between master node and slave node.
The protocol stack and the firmware library for STM32 have been developed in demo version by the controller
manufacturer (
) and are integrated into the application and middleware layers of the
evaluation board.
Daisy-chain communication can be implemented thanks to the two on-board RJ45 connectors.
UM2807
Ethernet real-time connectivity
UM2807
-
Rev 1
page 8/40







































































