





























2.1 PID Tuning Basics
2 – 3
www.thinkSRS.com
Stanford Research Systems
SIM960 Specifications
Control type
Proportional gain
Integral gain
Derivative gain
Offset
Bandwidth
Propagation delay
Noise (typical)
Parameter control
Parameter accuracy
Stability
Setpoint
External
Internal
Internal setpoint noise
Ramp
Amplifier output
Display resolution
Units
Operating temperature
Interface
Connectors
Power
Dimensions
Weight
Warranty
Manual
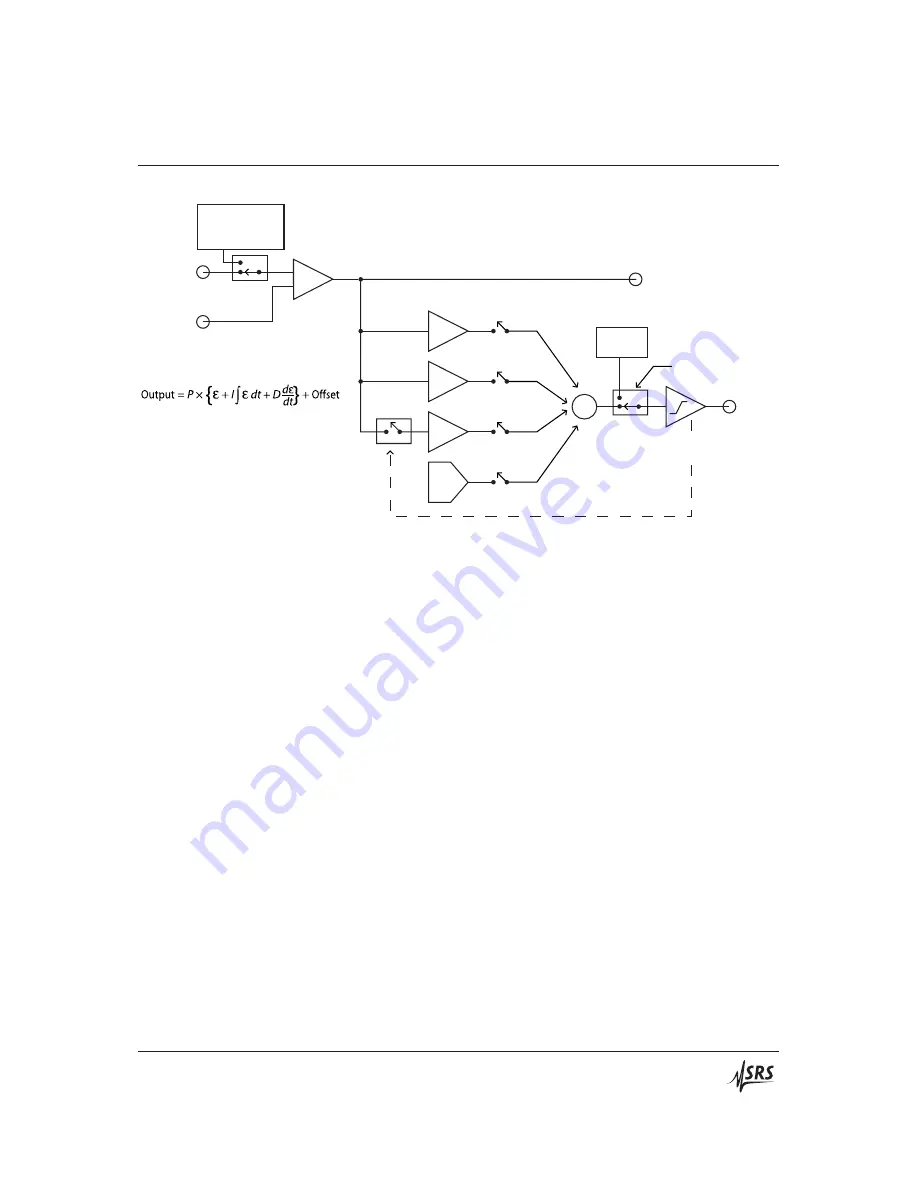
Control
Output
P
ε
×
P
ε
×
+
−
×
1
D
I
Offset
Control
Σ
Internal
Setpoint/Ramp
Generator
SP
M
Monitor Output
(rear panel BNC)
P
External
Setpoint
Input
Measure
Input
ε
= SP
−
M
*
Output**
Selector
* Antiwindup circuitry (see text)
** Bumpless transfer when
I
is enabled
Output Buffer w/User
Controlled Limits
Figure 2.1: The SIM960 block diagram.
process is noninverting, i.e. a small positive change at its input results
in a positive change at its output, then using positive
P
polarity will
ensure negative feedback in the loop. To see this, follow the e
ff
ect of a
small positive change at the process output. Since the process output
is connected to the
Measure
input of the SIM960, a small positive
change would cause a negative change to
ε
. The resulting change at
the controller
Output
would also be negative, as would be that of the
process output. Thus, the initial small positive change at the process
output is “corrected” by a negative change after going around the
feedback loop. As a general rule, if the process is noninverting, then
the
P
-polarity should be positive. If the process is inverting, negative
P
-polarity should be used.
Care should be taken in designing the process. The sensor should be
situated so that it is responsive to changes to the part of the system
under control. Placing the sensor too remotely can result in a time
delay which limits the quality of control. Also, the sensor should
primarily measure the system’s
response
to external changes, rather
than measure the changes directly. The latter can sometimes be used
to help the controller anticipate transients, but at the risk of sacrificing
accuracy in reaching the target setpoint.
Tuning a PID controller amounts to determining what the relative
contributions should be from each of the three types of control. The
simplest approach is to start with proportional control and add inte-
SIM960 Analog PID Controller
Содержание SIM960
Страница 4: ...ii Contents SIM960 Analog PID Controller...





















































