












-13-
No. TQ1230001-OM101-A
4. Mounting
4.1. Mounting
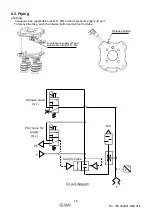
■
Mounting procedure
1) Confirm the gasket seal on the adapter, then mount 4 cups with adapter to the vacuum gripper unit.
(Tightening torque: 1N
・
m or tighten for 45 degrees using a spanner after tightening by hand)
2) Mount parallel pin to the robot tool flange pin hole.
3) Align the parallel pin of the robot tool flange with the flange for mounting the robot, and assemble them
with bolts included in the accessories. (Tightening torque: 5.2+/-0.5 Nm)
4) Tighten the vacuum gripper to the flange for mounting the robot.
(Tightening torque: 5.2+/-0.5 Nm)
Removal should be performed by following the mounting procedure in reverse.
Gasket seal
Adapter
Oval hole
Pin hole
Parallel pin
Vacuum gripper unit
Robot mounting flange
Tool flange
Hexagon socket head cap screw
(M6x10 8 pcs.)
Suction cups with adapter
1
)
2
)
3
)
4
)