




















RBTNKDOC160609A
System Elements and Maintenance Manual
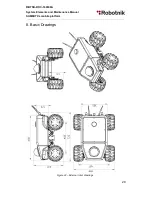
SUMMIT XL mobile platform
24V BMS 8CELLS 30A
Item
8 series balancing guard shield
Over charge protection (V)
3.95±0.025
Over charge recovery (V)
3.80±0.05
Over discharge voltage (V)
2.2±0.1
Over discharge recovery (V)
Cut load or charge
Normal working current (A)
30
Over current protection (A)
60
Internal resistance (m/ohm)
<30
Charging balancing current (mA)
60
Charging balancing voltage (V)
3.63±0.03
Over charge postpone time (mS)
1.2
Over discharge postpone time (mS)
144
Temperature protection ( ºC )
65ºC (option)
Temperature characteristic
±1.0mv/ºC
Working temperature ( ºC )
‐10~+60
Storage temperature ( ºC )
‐30~+85
Power loss (uA)
<400 (Vn=3.2v normal)
<200 (Vn=2.2v Under‐voltage)
Table 5 – Battery pack characteristics
23



































































