



























2F-85 & 2F-140 - Instruction Manual
5.2.4. Moment and Force Limits
The 2-Finger Adaptive Gripper has limits for moment and force values. The maximum moment and force values are independent
of the grasp force the gripper applies on its payload. For payload calculation, refer to the Payload and force section.
Warning
Always operate within range.
Calculation of maximum moments and forces should include robot accelerations and safety factors.
Parameters
Finger Option
2-Finger 85
2-Finger 140
Fx, Fy, Fz
50 N
25 N
Mx*
5 Nm
5 Nm
My*
5 Nm
5 Nm
Mz
3 Nm
3 Nm
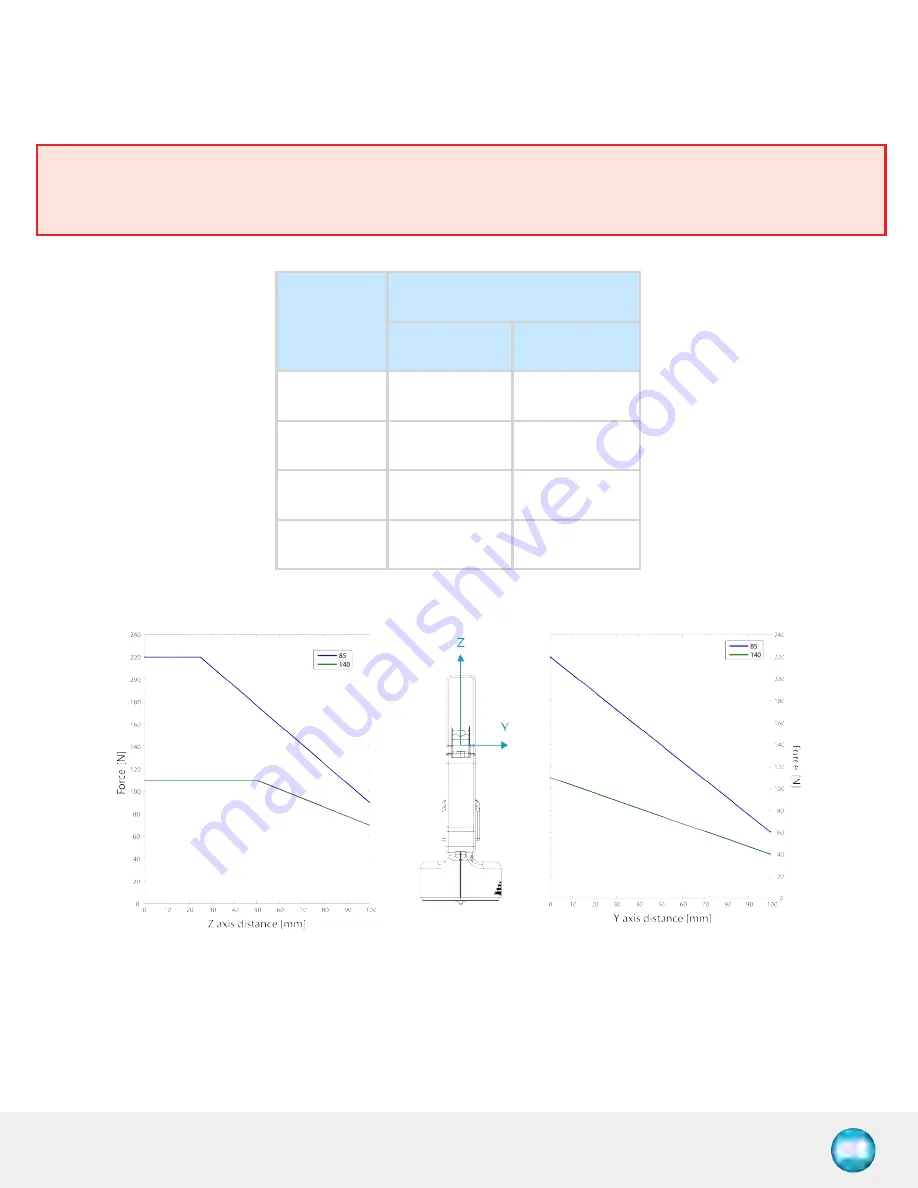
* Moments in x and y are calculated from the base of the fingertips as shown in Fig. 5-22.
Fig. 5-21: Maximum moment and force values
Fig. 5-22: Maximum recommended grip force in the Y and Z axis for the 2-Finger 85 and 2-Finger 140.
Usage example with listed limits :
l
After picking its normal payload, the robot can use the 2-Finger 85 Gripper to apply up to 50 N of force in any direction. Apply-
ing more then 50 N can damage the gripper or result in payload loss.
l
A gripper can pick up a screwdriver and apply 3 Nm of torque to screw ( such moment would be applied in the Z axis).
83