





























85
Controller Software Extensions
This section discusses extensions to the standard Guidance Controller software that are specific to the
PreciseFlex 400 Robot. Precise offers a Command Server software package that allows a PC to send
high level commands to the PF400 robot. This package is available upon request.
Adding or Removing the Optional Linear Axis
The optional Linear Axis may be added to existing PF400 robots by simply placing the robot on the Linear
Axis and plugging in the connectors from the Linear Axis stage. However the GPL version must be
3.2.H4 or later and the PAC files must be changed to support the robot with Linear Axis. If a robot is
installed on, or removed from, a linear axis new PAC files must be obtained from Precise and installed in
the robot controller and the robot must be re-calibrated, using CALPP_Rev21 or later.
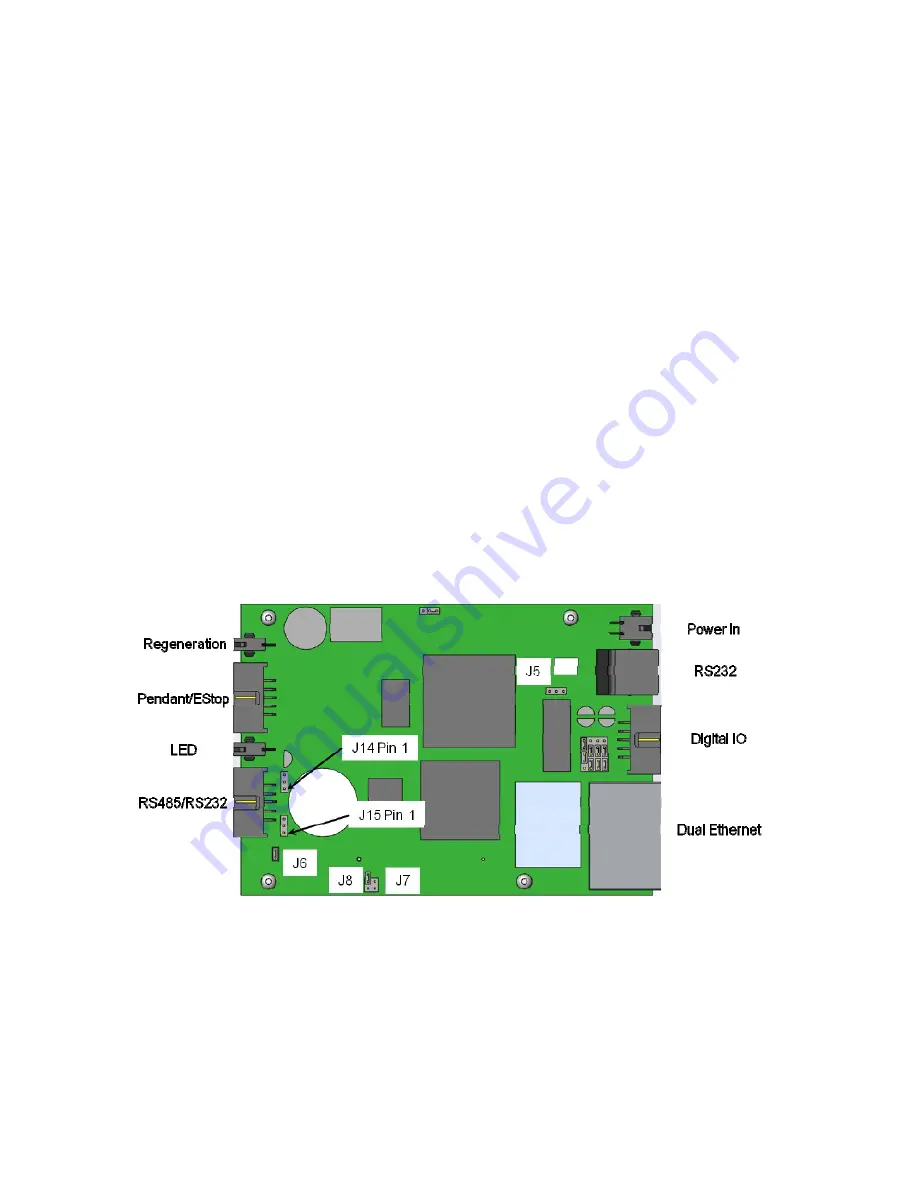
In addition, when adding a linear axis to a robot with a servo gripper for the first time, the J6 RS485
termination jumper on the robot controller in the inner link of the robot must be removed, as the RS485
bus is now extended to the end of the linear rail, where an RS485 jumper is installed. Failing to remove
this jumper can result in RS485 communication errors as there will be too many loads on the RS485 bus.
Note however that for robots with a pneumatic gripper, this jumper should not be removed as the
controller will form one end of the RS485 chain and the GSB controller in the linear rail or the GIO IO
board in the end of the linear rail should provide the second termination. If the GIO is installed, J6 should
be installed on the GIO and J6 should be removed from the GSB on the linear rail carriage. (See
sections on replacing the Linear Axis Controller and Installing the Optional GIO Board for pictures.)
There is a configuration parameter in the PAC files which determines whether the Linear Axis is
configured to add to the robot’s Y Cartesian Axis or X Cartesian Axis. The 5th element of the "Kinematic
dimension constants" (16050) will specify the orientation of the rail. A value of 0 has the rail moving along
+Y. To have the rail move along +X, the 5th parameter must be set to -90 (degrees).
The Linear Axis Option is configured so that the zero position is in the middle of the range of travel. The
software is configured so that the Linear Axis position is added to either the Y axis or X axis Cartesian
Содержание PF3400
Страница 8: ......
Страница 32: ...PreciseFlex_Robot 24 Appendix B TUV Verification of PF400 Collision Forces...
Страница 33: ...Introduction to the Hardware 25...
Страница 34: ...PreciseFlex_Robot 26...
Страница 35: ...Introduction to the Hardware 27...
Страница 37: ...Introduction to the Hardware 29 Appendix C Table A2 from ISO TS 15066 2016...
Страница 38: ...PreciseFlex_Robot 30 Table A2 Continued...
Страница 41: ...Introduction to the Hardware 33 PF400 500gm Safety Circuits PF3400 3kg Safety Circuits...
Страница 44: ...PreciseFlex_Robot 36 Finger Mount Height from Base PF400 Gripper Flange Mount Height from PF3400...
Страница 45: ...Installation Information 37...
Страница 46: ...PreciseFlex_Robot 38...
Страница 47: ...Installation Information 39...
Страница 48: ...PreciseFlex_Robot 40...
Страница 54: ...PreciseFlex_Robot 46 Schematic System Overview...
Страница 55: ...Hardware Reference 47 Schematic FFC Boards Revision B PF400...
Страница 56: ...PreciseFlex_Robot 48...
Страница 57: ...Hardware Reference 49 Schematic FFC Boards Revision C PF400...
Страница 58: ...PreciseFlex_Robot 50 Schematic FFC Boards 3kg PF400...
Страница 59: ...Hardware Reference 51...
Страница 60: ...PreciseFlex_Robot 52 Schematic Safety System Overview PF400 CAT3...
Страница 61: ...Hardware Reference 53...
Страница 62: ...PreciseFlex_Robot 54 Controller Power Amplifier Connectors Control Board Connectors...
Страница 63: ...Hardware Reference 55 Gripper and Linear Axis Controller Connectors...
Страница 64: ...PreciseFlex_Robot 56...
Страница 65: ...Hardware Reference 57...
Страница 66: ...PreciseFlex_Robot 58 Schematic Slip Ring for 60N Gripper...
Страница 67: ...Hardware Reference 59...
Страница 68: ...PreciseFlex_Robot 60...
Страница 69: ...Hardware Reference 61...
Страница 70: ...PreciseFlex_Robot 62...
Страница 71: ...Hardware Reference 63...
Страница 72: ...PreciseFlex_Robot 64...
Страница 73: ...Hardware Reference 65 Motor 60N Gripper...
Страница 74: ...PreciseFlex_Robot 66...
Страница 106: ...PreciseFlex_Robot 98 b The CALPP application takes about 1 minute to run...
Страница 124: ...PreciseFlex_Robot 116 Wiring for 60N Gripper with Battery Pigtail Wiring for Pneumatic Gripper...
Страница 125: ...117 Wiring for Vacuum Gripper Wiring for Vacuum Pallet Gripper...
Страница 129: ...121 Gripper racks centered in fully closed position Gripper racks centered in fully open position...
































































