





























®
M o d e l N o . M E - 9 5 0 2
E x p . 1 1 A : S i m p l e H a r m o n i c M o t i o n – P h y s i c a l P e n d u l u m
0 1 2 - 1 2 8 7 6 B
57
Exp. 11A: Simple Harmonic Motion–Physical Pendulum
Equipment Needed
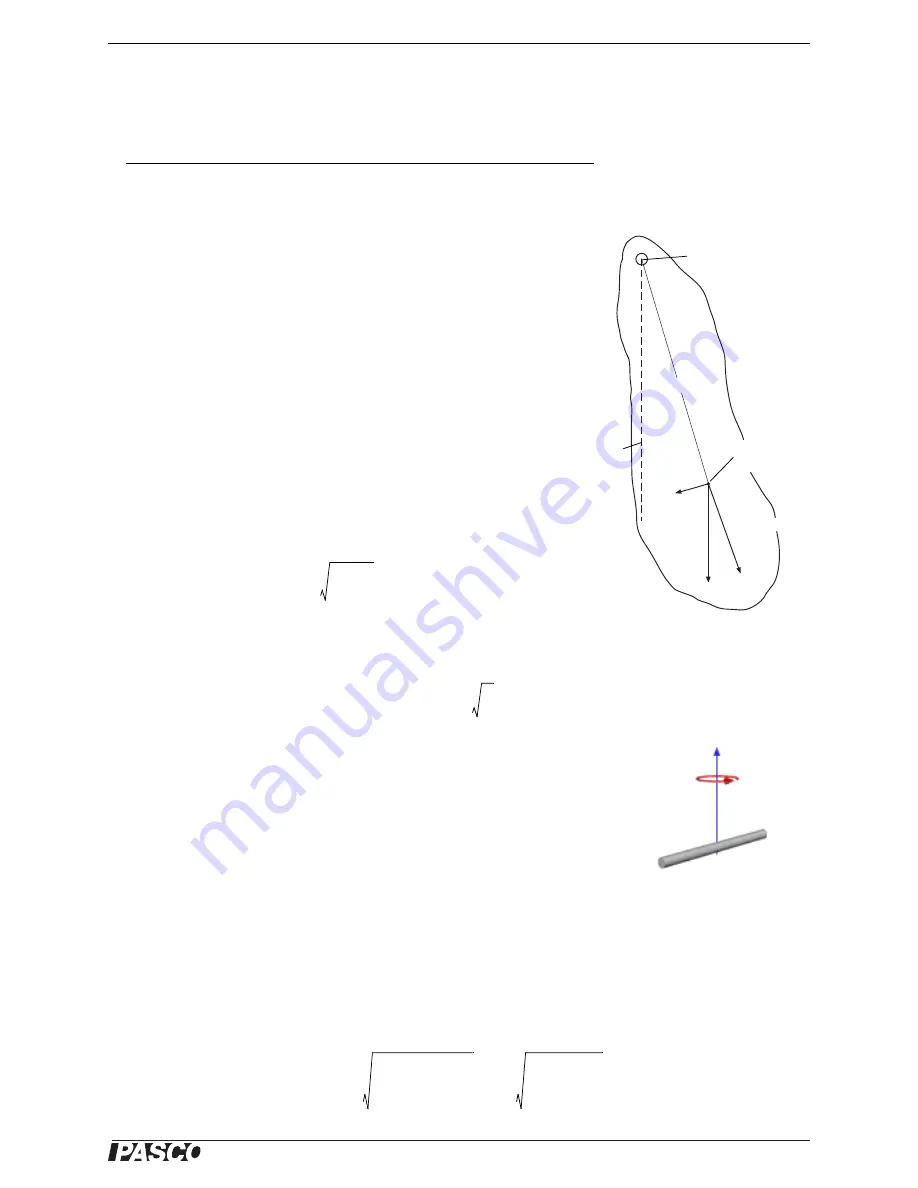
Theory
A simple pendulum is a mass on the end of a “massless” length of
string. A physical pendulum is any rigid body that pivots at some
point of the body so that it can rotate freely in a vertical plane under
the force of gravity. Let
L
cm
be the distance from the pivot point to
the center of mass of the body.
The torque that causes the rotation is produced by the component of
the force of gravity that is perpendicular to the line that joins the
pivot point to the center of mass, m
g
sin
. The torque is the product
of the lever arm,
L
cm
, and the perpendicular force, or
=
L
cm
m
g
sin
For small angles, sin
=
, so the expression for
the torque becomes
=
L
cm
m
g
or
= k
where k =
L
cm
m
g
.
Since the expression for torque matches the expression for the restor-
ing force,
F
= -k
x,
on an object in simple harmonic motion
,
the period
of oscillation for the physical pendulum can be written as follows:
where
I
, the moment of inertia (rotational inertia) for the physical
pendulum, replaces
M
and
L
cm
mg
replaces
k
in the equation for the
period of oscillation of a mass on a spring,
Assume that the Balance Arm beam is a rectangular-type rod. For a rod pivoting
around an axis through its center of mass, the moment of inertia around the center
of mass is:
where
m
is the mass and
L
is the length of the rod.
What happens if the rod pivots around one end rather than its center of mass? If
the rod pivots around any other axis that is parallel to the axis through the center of mass, you can use the Parallel
Axis Theorem to calculate the moment of inertia around that parallel axis. The moment of inertia about the parallel
axis,
I
parallel
, is the sum of the moment of inertia around the center of mass,
I
cm
, plus
mL
cm
2
, where
m
is the mass
of the rod and
L
cm
is the perpendicular distance from the center of mass to the pivot point, or
The formula for the period of oscillation becomes
Item
Item
Statics Board
Balance Arm
Stopwatch (ME-1234)
Figure 11.1: Physical Pendulum
mg
mg sin
mg cos
Equilibrium
position
Pivot
point
Center of
mass
L
cm
T
2
I
L
cm
mg
-----------------
=
T
2
M
k
-----
=
Fig. 11.2: Moment of Inertia
I
cm
1
12
------
mL
2
=
I
parallel
I
cm
mL
cm
2
+
1
12
------
mL
2
mL
cm
2
+
=
=
T
2
1
12
------
mL
2
mL
cm
2
+
L
cm
mg
----------------------------------------
2
1
12
------
L
2
L
cm
2
+
L
cm
g
-------------------------------
=
=
Содержание ME-9502
Страница 1: ... PASCO Mechanics Statics System ME 9502 Instruction Manual 012 12876B 012 12876 ...
Страница 4: ... Statics System iv 012 12876B ...
Страница 20: ...Statics System Exp 2 Adding Forces Resultants and Equilibriants 16 012 12876B ...
Страница 24: ...Statics System Exp 3 Resolving Forces Components 20 012 12876B ...
Страница 28: ...Statics System Exp 4 Torque Parallel Forces 24 012 12876B ...
Страница 32: ...Statics System Exp 5A Center of Mass 28 012 12876B ...
Страница 36: ...Statics System Exp 5B Equilibrium of Physical Bodies 32 012 12876B ...
Страница 44: ...Statics System Exp 7 The Inclined Plane 40 012 12876B ...
Страница 50: ...Statics System Static Friction on an Inclined Plane 46 012 12876B ...
Страница 60: ...Statics System Exp 10 Simple Harmonic Motion The Simple Pendulum 56 012 12876B ...
Страница 66: ...Statics System Exp 11A Simple Harmonic Motion Physical Pendulum 62 012 12876B ...
Страница 70: ...Statics System Exp 11B Minimum Period of a Physical Pendulum 66 012 12876B ...
Страница 76: ...Statics System Exp 11C Simple Harmonic Motion Beam on a Spring 72 012 12876B ...
Страница 84: ...Statics System Exp 13 Simple Machines The Inclined Plane 80 012 12876B ...
Страница 94: ...Statics System Technical Support 90 012 12876B ...