





























Parker Hannifin S.p.A. - Divisione S.B.C. “SPD” User’s Manual
51
8.5 Electrical shaft + Positioner (operating mode 13)
Operating mode 13 includes the electrical shaft, dynamic positioner and flow speed functions
in order to use them at the same time.
The tracking function refers to the input frequency signal (X42 connector) set as an input
encoder signal by setting b42.0=0 and b42.5=1. This encoder signal is counted at every end of
the communication of A and B signals. The counter of the motor position is incremented at
the rate of 4096 steps per revolution. The user can program the ratio between the master and
the slave by using parameters Pr52 and Pr53. It is possible to choose the ramp to use during
the engaging or release phase (Pr103). The main ramps and the internal PLC can be used to
program different engaging and release modes with or without phase recovery. See the
connection diagrams in the section, Input frequency connection. If you use a digital input for
the engaging command, the digital input 0 in FAST-IN mode must be used in order to
minimize phase errors.
The positioner function follows a trapezoidal profile in which the acceleration and
deceleration ramps are defined by Pr109, the full speed by Pr108 and the final position by
Pr118:119 (one revolution of the motor equals 4096 steps). The parameters can be modified at
any time. The current position of the positioner is given by the parameter Pr116:117. You can
add a speed by using Pr104.
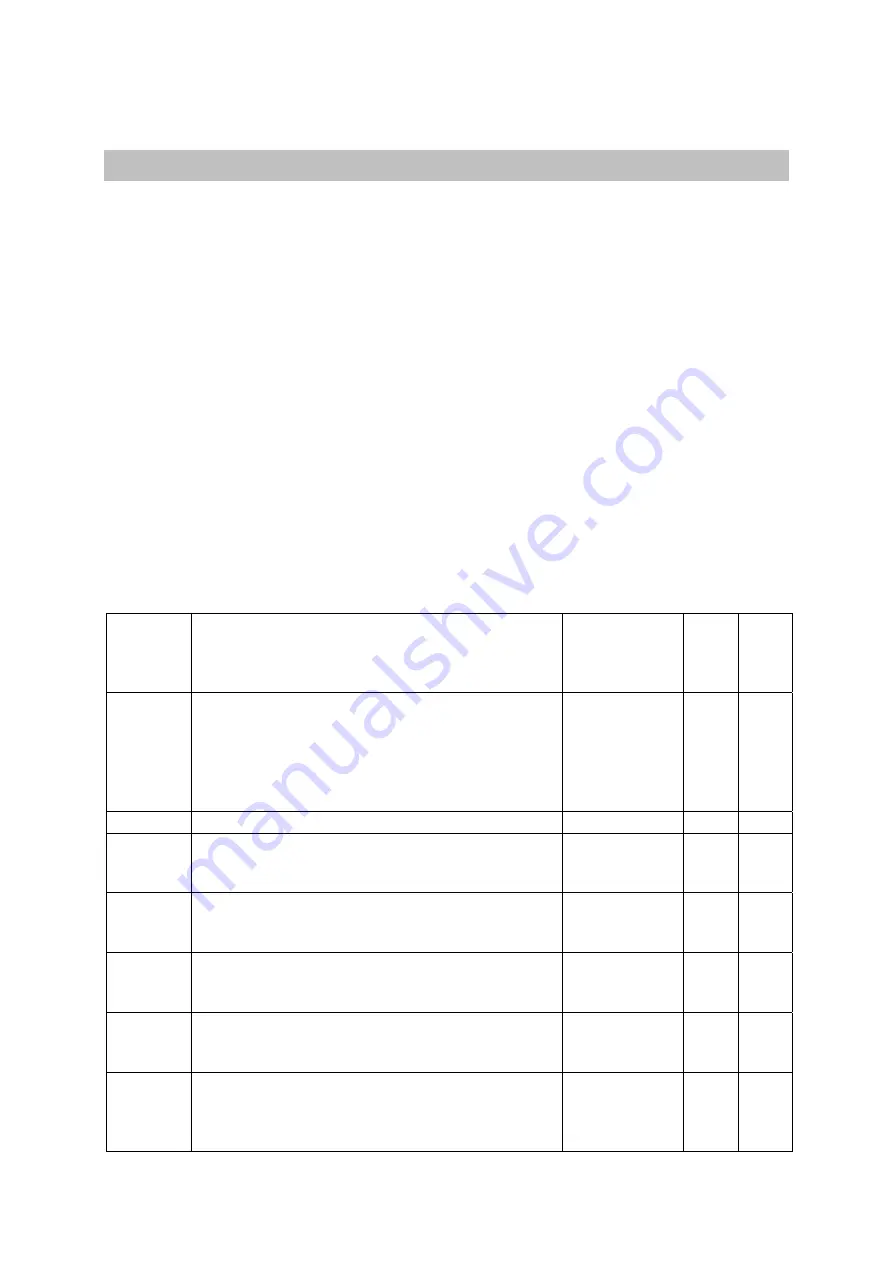
OPERATING MODE 13 PARAMETERS
Par. Description Field/Unit
Def.
Type
/
Note
s
Pr103
Acceleration and deceleration ramp (el. axis)
.
The acceleration and deceleration required for the
motor can be limited in order to achieve a jump
of 1000 rpm that takes Pr103 thousandths of a
second. This can be useful when the axis is
suddenly attached.
0÷30000
[s/Krpm]
0,500 R/W
Pr104
Addition speed.
±
6000
0 R/W
Pr108
Full speed (positioner).
This is the full speed
that will be used during the generation of the
position profile.
0÷9000
1000 R/W
Pr109
Acceleration time (positioner)
. This is the
acceleration ramp that will be used during the
positioning profile.
0,002÷30000
[s/Krpm]
0.5
R/W
Pr114
Pr115
Actual position (electrical shaft).
Indicates the
actual position with reference to the electrical
shaft.
[counts]
R
Pr116
Pr117
Actual position (positioner).
read-only
parameter. Indicates the actual position with
reference to the trapezoidal profile.
[counts]
R
Pr118
Pr119
Final position (positioner)
. The parameter used
to set the final position desired for the generator
of the trapezoidal profile, based on 4096 steps per
revolution.
[counts]
R/W







































































