















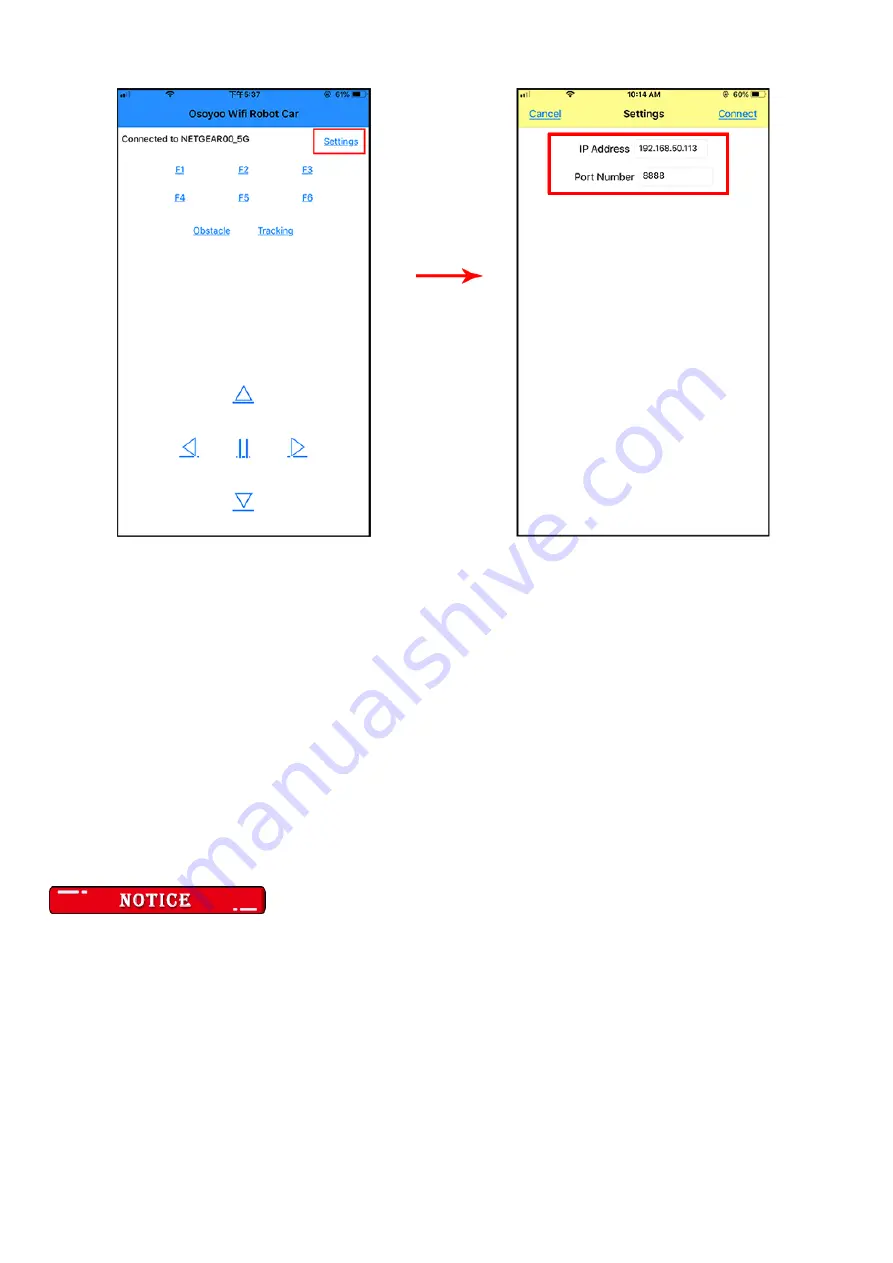
set this IP address to your APP Setting section (no need change default port 8888 in APP).
(5)Now your Robot car is connected to your LAN, you can use Mobile phone under same LAN
to control the robot car. If your APP is in WAN, you need to go to your Router Control
Panel, forward Port 80 to Robot car LAN IP address, then you can use Router IP to control
the car. This feature makes our robot car A REAL INTERNET OF THING device
(6)You can click the “< " ">” ” ^” ” v ” direction keys to make the car move. Use
“||” pause key to stop the car movement.
Click Obstacle to shift left side, Click Tracking to shift right side.
Click F1 to make upper-left diagonal movement, Click F3 to make upper-right diagonal
movement
Click F4 to make back-left diagonal movement, Click F6 to make back-right diagonal
movement.
Speed tunning
If you want change the speed performance of the robot car, please following parameters in
line 11 to 13:
#define SPEED 85
#define TURN_SPEED 90
#define SHIFT_SPEED 130
Содержание Mecanum Omni
Страница 1: ...Mars Explorer Mecanum Wheel Robotic Kit Arduino Mega2560 More information http osoyoo com p 30176 ...
Страница 7: ...Picture 6 Type A and Type B motors location map in chassis Picture 7 Wheel installation map ...
Страница 10: ...Picture 12 Wifi shield installation guide ...
Страница 13: ...Picture 17 Connect Rear model X control pins to Mega2560 Picture 18 Connect Model X to Voltage meter ...
Страница 14: ...Open source Arduino Software IDE Download Arduino IDE here https www arduino cc en Main Software setlang en ...
Страница 28: ...STEP2 Bluetooth Module should be inserted into bluetooth 6 pin slot in OSOYOO Wifi Board ...



































































