
























4.0 Functional Description
(Refer to
Figure 1 )
TWISTED PAIR INTERFACE (TPI) MODULE
The TPI consists of five main logical functions:
a) The Smart Squelch, responsible for determining when
valid data is present on the differential receive inputs
(RXI
g
).
b) The Collision function checks for simultaneous transmis-
sion and reception of data on the TXO
g
and RXI
g
pins.
c) The Link Detector/Generator checks the integrity of the
cable connecting the two twisted pair MAUs.
d) The Jabber disables the transmitter if it attempts to trans-
mit a longer than legal packet.
e) The Tx Driver & Pre-emphasis transmits Manchester en-
coded data to the twisted pair network via the summing
resistors and transformer/filter.
SMART SQUELCH
The ST-NIC implements an intelligent receive squelch on
the RXI
g
differential inputs to ensure that impulse noise on
the receive inputs will not be mistaken for a valid signal.
The squelch circuitry employs a combination of amplitude
and timing measurements to determine the validity of data
on the twisted pair inputs. There are two squelch levels
which are selectable via the SQSEL pin. One mode is
10BASE-T compatible, and the second is reduced squelch
mode.
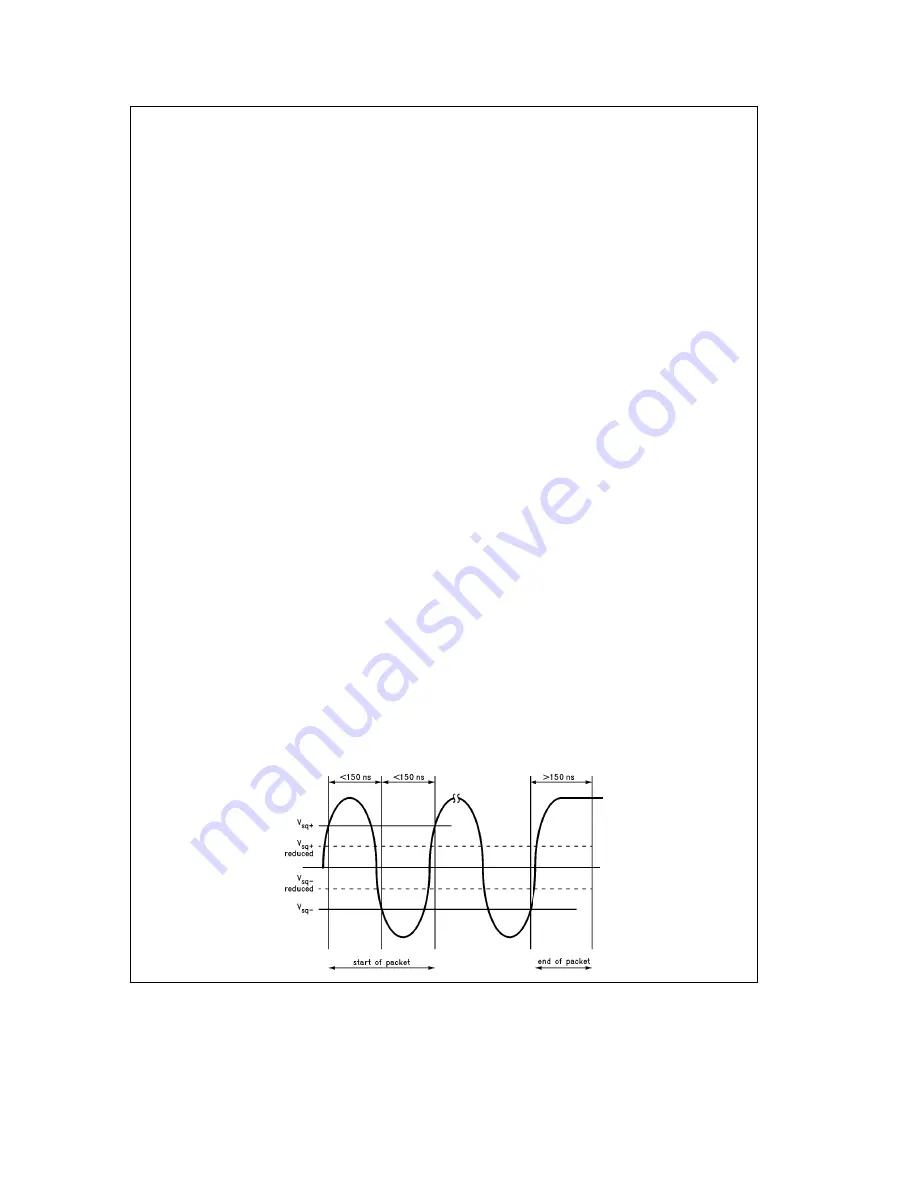
The diagram shows the 10BASE-T mode operation of the
smart squelch.
The signal at the start of packet is checked by the smart
squelch and any pulses not exceeding the squelch level
(either positive or negative, depending upon polarity) will be
rejected. Once this first squelch level is overcome correctly
the opposite squelch level must then be exceeded within
150 ns. Finally the signal must exceed the original squelch
level within a further 150 ns to ensure that the input wave-
form will not be rejected. The checking procedure results in
the loss of typically three bits at the beginning of each pack-
et.
Only after all these conditions have been satisfied will a
control signal be generated to indicate to the remainder of
the circuitry that valid data is present. At this time the smart
squelch circuitry is reset.
Valid data is considered to be present until either squelch
level has not been generated for a time longer than 150 ns,
indicating End of Packet. Once good data has been detect-
ed the squelch levels are reduced to minimize the effect of
noise causing premature End of Packet detection.
The reduced squelch mode functions the same as the
10BASE-T mode except that only the lower level is used for
both turn-on and turn-off.
COLLISION
A collision is detected by the TPI module when the receive
and transmit channels are active simultaneously. If the TPI
is receiving when a collision is detected it is reported to the
controller immediately. If, however, the TPI is transmitting
when a collision is detected the collision is not reported until
seven bits have been received while in the collision state.
This prevents a collision being reported incorrectly due to
noise on the network. The signal to the controller remains
for the duration of the collision.
Approximately 1
m
s after the transmission of each packet a
signal called the Signal Quality Error (SQE) consisting of
typically 10 cycles of 10 MHz is generated. This 10 MHz
signal, also called the Heartbeat, ensures the continued
functioning of the collision circuitry.
LINK DETECTOR/GENERATOR
The link generator is a timer circuit that generates a link
pulse as defined by the 10BASE-T specification that will be
generated by the transmitter section. The pulse which is
100 ns wide is transmitted on the TXO
a
output, every
16 ms, in the absence of transmit data.
The pulse is used to check the integrity of the connection to
the remote MAU. The link detection circuit checks for valid
pulses from the remote MAU and if valid link pulses are not
received the link detector will disable the transmit, receive
and collision detection functions.
The GDLNK output can directly drive a LED to show that
there is a good twisted pair link. For normal conditions the
LED will be on. The link integrity function can be disabled as
described in the Pin Description Section.
JABBER
The jabber timer monitors the transmitter and disables the
transmission if the transmitter is active for greater than
26 ms. The transmitter is then disabled for the whole time
that the ENDEC module’s internal transmit enable is assert-
ed. This signal has to be deasserted for approximately
750 ms (the unjab time) before the Jabber re-enables the
transmit outputs.
TRANSMIT DRIVER
The transmitter consists of four signals, the true and com-
plement Manchester encoded data (TXO
g
) and these sig-
nals delayed by 50 ns (TXOd
g
).
TL/F/11157 – 5
9
Obsolete







































































