





















TRANSPORT
Turn off the lawn mower before moving it over non-grass surfaces and when it is transported to and from the
mowing area.
Remove and secure the battery before transporting the robot.
For transport, the robot should be secured with transport belts, and if possible, transport the robot for mowing grass in its original
packaging.
Use caution when transporting, remembering that the robot's knife blades are very sharp.
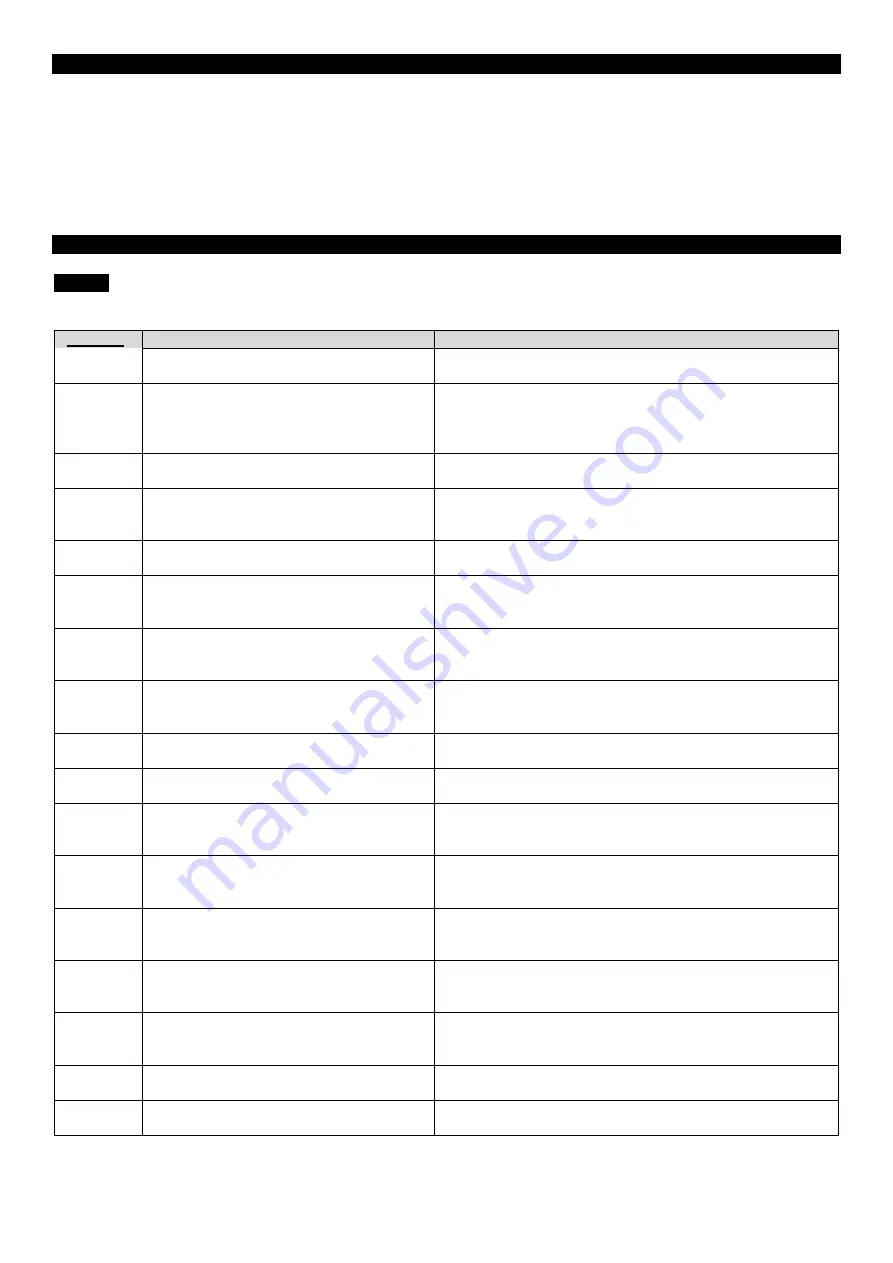
INSPECTIONS AND TROUBLESHOOTING
.
.
Robot status and error messages
Announcement
Possible cause
Emergency shutdown has been triggered.
Solution
E1
Restart the robot on the boundary wire.
E2
Lifting sensor has tripped.
Check that all the robot's wheels are in contact with the lawn and that
the robot is not blocked by the wheel. Restart the robot on the
boundary wire.
E3
Robot is out of range of the work
area marker cord.
The work area marker cable is
broken.
Put the robot on the perimeter wire, restart.
E4
The red indicator light is blinking? Check and repair the
damage. Restart the robot on the boundary wire.
E5
Collision sensor has tripped.
Remove the obstacle. Restart the robot on the boundary wire.
E6
Too much power draw for the left engine due to too
high grass (> 4 cm) and the left wheel being blocked.
Too high power consumption of right engine due
to too high grass (> 4 cm) and right wheel blocked.
Overloading of the mowing motor due to
too high grass (> 4 cm) and blocked mowing
mechanism.
Error while loading.
Restart the robot on the boundary wire.
E7
Restart the robot on the boundary wire.
E8
Unlock the mowing mechanism and restart on the
limiting cable.
E9
Battery failure, turn the robot on / off several times.
If the error persists, contact the NAC service center.
The battery is broken, contact the service center.
E10
Battery over / under voltage.
E12
The tilt sensor has tripped.
The slope is more than 20 degrees. Restart the robot on the
boundary wire.
E12
The wheel slips.
The grass is too high or wet. Restart the robot on the
boundary wire.
E13
Battery overheating.
Wait for the battery to cool down. Restart the robot on the
boundary wire.
F1
The robot does not start, but there is a signal on the charging
station.
Check that the robot has not strayed beyond the boundary line. Check
that the boundary wire is properly connected.
F2
Robot does not start, no signal on charging
station.
Is the boundary cable / power supply properly
connected?
F3
The robot stopped.
Place the robot in the docking station and start it.
F4
Battery voltage too low.
Place the robot in the docking station, fully charge the robot's battery.
ATTENTION! If the robot shuts down, it must be started on the docking station.
17
Содержание RLM1500G2-NG
Страница 1: ...1 Translated from Polish to English www onlinedoctranslator com ...
Страница 2: ...2 ...
Страница 19: ...19 ...
Страница 24: ...24 ...







































































