





























3 Controller
RT ToolBox2/RT ToolBox2 mini 3-83
■ Functions
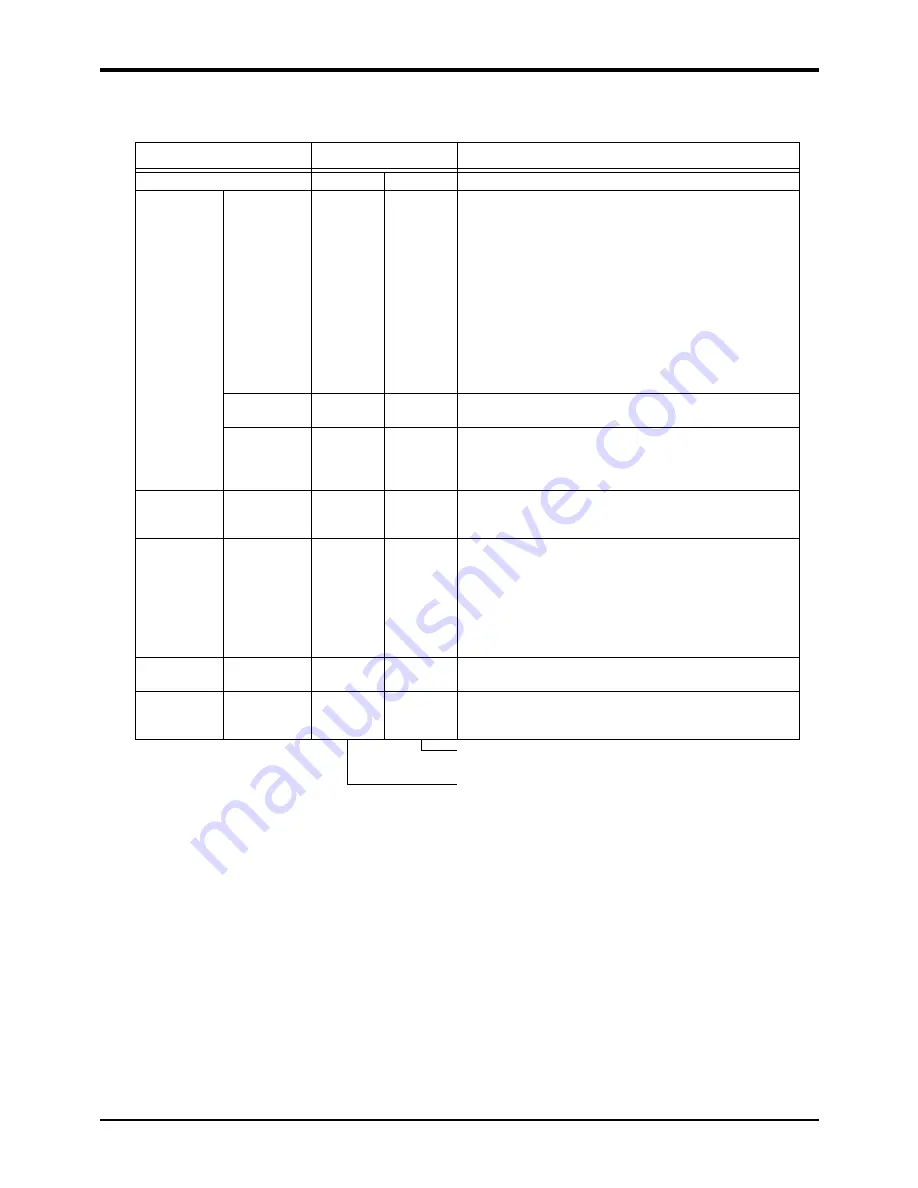
Table 3-37 : Functions
Function
Functional existence
Note1)
Note1)The functions included with the RT ToolBox2 and the RT ToolBox2 mini are shown below.
○ : Function provided × : Function not provided
Details
Compatible model
○
○
Personal computer running Microsoft Windows2000/XP/Vista.
Program editing
functions
Editing functions
○
○
・ MELFA BASIC Ⅴ language compatible
・ Multiple editing screen simultaneously display
・ Command input, comment writing
・ Position data editing
・ File operation (writing to controller, floppy disk, personal computer)
・ Search and replace function (using characters, line Nos., labels)
・ Copy, cut, paste, insert (per character, line), undo (per command
statement, position conversion)
・ Line No. automatic generation, renumbering
・ Batch syntax check
・ Command template
・ Position conversion batch editing
・ Position variable template
・ Print, print preview
Control func
-
tions
○
○
・ Program file control (list, copy, movement, delete, content compari
-
son, name change, protect)
Debugging func
-
tions
○
○
・ Direct editing of program in controller
・ Confirmation of robot program operation (step execution, direct exe
-
cution)
・ Tact time measurement
Note2)
Note2)When using the RT ToolBox2 mini, connect with the controller and measure.
Simulation func
-
tion
○
×
・ Off-line simulation of robot program operation using CG (computer
graphics)
・ Tact time calculation
Monitor func
-
tions
○
○
・ Robot operation monitor (robot operation state, stop signal, error
monitor, program monitor (execution program, variables), general-pur
-
pose input/output signals (forced output possible), dedicated input/
output signals, operation confirmation (operation range, current posi
-
tion, hand, etc.)
・ Operation monitor (working time statistics, production information,
robot version)
・ Servo monitor (position, speed, current, load, power)
Maintenance
function
○
○
・ Parameter setting
・ Batch, divided backup
Remote mainte
-
nance function
○
○
・ Monitoring and maintenance of robot state at remote site using tele
-
phone line.
(A separate modem is required for this function.)
RT ToolBox2 mini
(3D-12C-WINE)
RT ToolBox2
(3D-11C-WINE)
Содержание RV-12SD Series
Страница 2: ......
Страница 6: ...Revision history Date of print Specifications No Details of revisions 2008 05 9 BFP A8656 First print...
Страница 65: ...3 52 Magnet contactor control connector output AXMC for addition axes 3 Controller...
Страница 104: ...5Instruction Manual The details of each instruction manuals 5 91...
Страница 117: ......







































































