

























3 Controller
Pneumatic hand interface 3-57
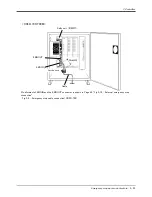
(2) Pneumatic hand interface
■ Order type: 2A-RZ365(Sink type)
■ Outline
This interface is required to use the robot arm's hand output signals. This interface is
pre-installed on the controller.
・ Up to eight hand output points can be used with this interface.
・ The eight hand input points can be used without this interface.
・ The previous pneumatic hand interface can be used. .
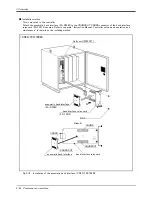
■ Configuration
Table 3-9 : Configuration device
■ Specifications
Table 3-10 : Specifications
Part name
Type
Qty.
Remarks
Pneumatic hand interface
2A-RZ365
1pc.
Output 8 points expansion.
Item
Specification
Internal circuit
Type
Transistor output
<Sink type>
* GRn = GR1 ~ GR8
No. of output points
8
Insulation method
Photo coupler insulation
Rated load voltage
DC24V
Rated load voltage range
DC21.6 to 26.4VDC
Max. current load
0.1A/ 1 point (100%)
Current leak with power OFF
0.1mA or less
Maximum voltage drop with power ON DC0.9V(TYP.)
Response time
OFF-ON
2ms or less (hardware response time)
ON-OFF
2 ms or less (resistance load) (hardware response time)
Fuse rating
Fuses 1.6A (each one common)
Common method
8 points, 1 common
24V
(Internal power supply)
*
GRn
Fuse
1.6A
0V
Содержание RV-12SD Series
Страница 2: ......
Страница 6: ...Revision history Date of print Specifications No Details of revisions 2008 05 9 BFP A8656 First print...
Страница 65: ...3 52 Magnet contactor control connector output AXMC for addition axes 3 Controller...
Страница 104: ...5Instruction Manual The details of each instruction manuals 5 91...
Страница 117: ......







































































